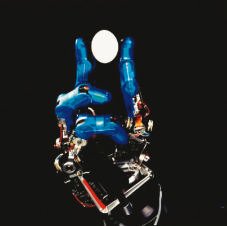
Eine antropomorphe Hand für den Einsatz in der Servicerobotik haben DLR-Forscher entwickelt. Als Vorbild diente ihnen das menschliche Greifwerkzeug.
Ähnlich wie der Mensch mit seinen Händen müssen mobile Serviceroboter künftig in der Lage sein, unbekannte Gegenstände zu greifen, zu transportieren und in der Umwelt vielfältige Aktionen auszuführen. Forscher des Instituts für Robotik und Mechatronik der DLR in Oberpfaffenhofen haben eine Roboterhand entwickelt, die die Anforderungen an ein solches Greif- und Manipulationswerkzeug erfüllt. Der jüngsten Generation seiner DLR-Hand hat das Team um Koordinator Jörg Butterfaß vier Finger mit jeweils vier Gelenken implantiert. Hinzu kommen drei unabhängige Freiheitsgrade. Ein weiterer Freiheitsgrad in der Handfläche ermöglicht es, das mechatronische System den Anforderungen für stabiles Greifen oder Feinmanipulation anzupassen. Sensorik sorgt dafür, dass sich die Hand exakt regeln lässt und Greifkräfte wie auch Fingerpositionen feinfühlig rückgemeldet werden. Da Antriebstechnik, Sensorik und Kommunikationselektronik in der Hand integriert sind, soll sie so flexibel sein, dass sie bei unterschiedlichen Robotern eingesetzt werden kann
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:








{kind=link}