


Automatisierung | Mit einer vollautomatischen Anlage zum Bearbeiten von Pleuel hat sich Fanuc den zweiten Platz gesichert. Das Meisterstück in der Robotik-Zelle ist ein Sensor, der den Griff in die Kiste auf ein neues Niveau heben soll. §
Autor: Uwe Böttger
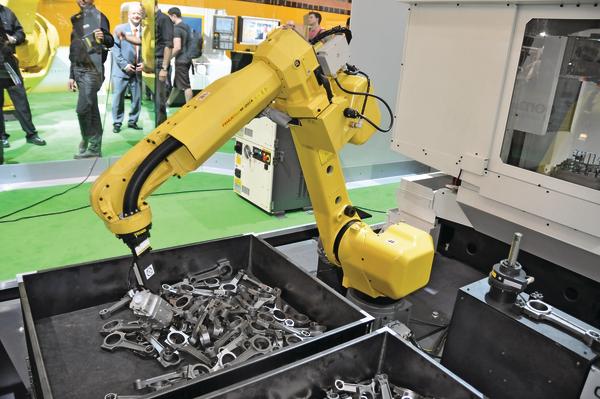
Zu den Bewerbungsunterlagen von Fanuc für den Robotics Award 2014 gehört ein Video, das die eingereichte Lösung in Aktion zeigt. Der Zuschauer sieht darin einen Roboter, der sich aus einer Gitterbox ein Pleuel greift, um es anschließend in die erste von insgesamt drei Bearbeitungsmaschinen abzulegen. Im gleichen Moment rauscht von rechts ein zweiter eiserner Werker heran, der ein bereits fertig bearbeitetes Werkstück aus der gleichen Maschine holen will. Die Türe zum Bearbeitungsraum geht auf, beide Roboter stürzen sich fast gleichzeitig hinein, der Zuschauer zuckt zusammen und denkt: Oh Gott, es kracht.
Natürlich kracht es nicht. Bevor zwei Fanuc-Roboter aneinander geraten, fällt der Himmel auf das Dach der Fertigungshalle. Im letzten Moment legt der erste Roboter eine Vollbremsung ein, wartet, bis der Kollege mit seinem Part durch ist und nimmt dann mit unverminderter Geschwindigkeit seine Arbeit wieder auf. „Der Eindruck täuscht nicht“, weiß Armin Österle, Support Engineer bei der Fanuc Deutschland GmbH im schwäbischen Neuhausen. „In der Zelle geht es manchmal eng zu, wir haben eben alles rausgeholt.“
Das Meisterstück der neuen Anlage, die vorerst nur in Japan genutzt wird, ist ein unscheinbarer Kasten, der oberhalb der Gitterbox montiert ist. Darin steckt der so genannte 3D-Area-Sensor, mit dem Fanuc beim berühmten Griff in die Kiste ein neues Kapitel aufschlagen will. Der Sensor erkennt unsortierte Teile in der Box, lokalisiert sie dreidimensional und liefert dem Roboter exakte Informationen für die jeweils beste Greifposition. Dabei gibt es keinen Übergang mehr zwischen der Vorerkennung in 2D und der Feinsuche in 3D. Das komplett in die Robotersteuerung integrierte Gerät erzeugt die Positionsdaten der Werkstücke mit nur einer Aufnahme. Das erleichtert das Einrichten und beschleunigt vor allem die Zykluszeiten. Je nach Rahmenbedingung bekommt der Roboter seine Informationen um die Hälfte schneller. Und da es nur noch einen Sensor pro Kiste gibt, verliert die Applikation an Komplexität.
Zusätzliche Software-Tools beschleunigen die erste Phase in der Roboterzelle weiterhin: So verwaltet der so genannte Part Manager die Positionsdaten von erkannten Teilen und ordnet sie automatisch nach der jeweils besten Greiflage. Dabei wird berücksichtigt, ob das Teil verkantet ist oder ob ein anderes Werkstück teilweise darüber liegt. Eine zweite Funktion verrechnet die Daten der Teile, des Greifers und der Umgebung miteinander und vermeidet eine Kollision des Roboters mit einer Behälterkante. „Es wird eine regelrechte Strategie entwickelt, um an das nächste Werkstück zu kommen“, beschreibt Österle den Vorgang. Nach dieser Startphase, dem Griff in die Kiste, sind gleich zwei Fliegen mit einer Klappe geschlagen: Die Werkstücke müssen nicht mehr vereinzelt und auch nicht vorsortiert werden.
Im zweiten Schritt legt der erste Roboter das Teil in die erste von drei CNC-Maschinen ab. Hier werden die Oberfläche und die seitlichen Kanten der Gussteile geglättet. Noch während sich die Tür der Maschine öffnet, bewegt sich der eiserne Werker mit dem Pleuel bereits in den Innenraum. Das lässt sich mit bloßem Auge erkennen. „Eine Besonderheit in der Anlage“, weiß Österle. Die Luke wird mit Servomotoren angetrieben. Beschleunigung und Verzögerung lassen sich mit dieser Technik exakter regeln als mit der alternativen Druckluft. Und man erreicht eine ordentliche Maximalgeschwindigkeit beim Öffnen und Schließen.
Was man nicht sehen kann: Die Motoren werden nicht von der CNC-Maschine gesteuert, sondern vom Roboter. Die Türen sind dabei eine Zusatzachse des eisernen Werkers. „In der Anlage nutzen wir Sechsachs-Roboter, aber unsere Steuerung kann bis zu vierzig Achsen interpolieren“, erklärt der Fanuc-Mann. „Wir haben also reichlich Reserve.“ Der Zeitgewinn durch die überlagerten Bewegungen von Luke und Roboter ist bei einem Durchgang minimal. Aber bei der Pleuel-Fertig ung laufen Millionen von Teilen über die Anlage. „Was man da am Ende spart, kann sich jeder leicht ausrechnen“, so Österle.
Nach der Vorbearbeitung holt der zweite Roboter – sozusagen im fliegenden Wechsel – das Teil ab und bringt es in die zweite Maschine, wo die Bohrungen gesetzt werden. In der dritten Maschine schließlich wird das Pleuelauge bearbeitet. Damit der zweite Roboter alle Positionen erreicht, ist er auf eine Niederflurschiene montiert, die auch als Zusatzachse verwaltet wird. „Aber nicht nur das“, erzählt Österle. „Die Schiene wird auf das kinematische Modell mit drauf gerechnet.“ Das heißt: Es wird rechnerisch nicht nur der Roboter hin- und hergeschoben, sondern der so genannte Tool Center Point, der Arbeitspunkt des Roboters.
Im Vergleich zum Standard hat Fanuc die Niederflurschiene in der Höhe um die Hälfte reduziert. Dadurch wird die Anlage für den Service-Techniker zugänglicher. Die niedrigere Bauart ist auch von Vorteil, wenn die Zelle in bestehende Anlagen integriert wird, wo die Versorgungsleitungen unter der Decke verlaufen. Da kann es für einen Roboter auf einer Standardschiene schnell zu eng werden. Und schließlich bietet die reduzierte Höhe mehr Freiheiten beim Design der Produktionslinie.
Nach der abschließenden Bearbeitung des Pleuelauges legt der zweite Roboter das Werkstück auf eine Zwischenstation, wo es vom ersten Roboter abgeholt wird. Jetzt beginnt die Hundert-Prozent-Kontrolle in der Anlage. Das Pleuelauge wird dazu auf eine Lehre gesteckt. Die dazu notwendige Kraft wird mit einem Sensor ermittelt, der Kräfte und Drehmomente in alle Richtung misst. Daraus lässt sich die Maßhaltigkeit der Bohrung ableiten. „Wir können garantieren, dass nur Gut-Teile die Anlage verlassen“, schwört Österle.
Energieeffizienz war beim Entwurf der Zelle ebenfalls ein Thema. So brauchen die Roboter im Stillstand zum Beispiel keinen Haltestrom. Stattdessen sind die Motoren der Modelle mit Bremsen ausgestattet. Bei einem Stopp werden die Servomotoren abgeschaltet und die mechanische Bremse fällt ein. Auf diese Weise kann der Roboter seine Position bombensicher halten.
Auch wenn es in der Zelle teilweise knapp zugeht, ist eine Kollision zwischen den beiden Robotern ausgeschlossen. Das gilt sogar für den Fall einer fehlerhaften Programmierung. „In den engen Arbeitsräumen lassen sich die Roboter zueinander verriegeln“, erklärt Österle. Dafür werden die Modelle zunächst eingemessen. Und wenn sie in Aktion sind, wissen sie dank der Ethernet-Verbindung immer, wo sie sind. Bildlich ausgedrückt besitzen beide Roboter eine schützende Hülle aus Software. Die beiden Kokons können sich im Betrieb nicht überschneiden.
Die Zelle ist für den mannlosen Betrieb ausgelegt. Der Werker aus Fleisch und Blut wird hier nicht mehr gebraucht – allenfalls zum Material nachfüllen. Man kann aber theoretisch auch mehrere Gitterboxen mit Werkstücken bereitstellen. Dann reicht der Vorrat für eine komplette Schicht.
Derzeit wird die Anlage nur in Japan von Automobilzulieferern genutzt. Die Einführung in Europa steht an. Fanuc geht von einem guten Geschäft aus. „Der neue Area-Sensor in Verbindung mit der Maschinenverkettung ist genau das, was man hier braucht“, ist sich Österle sicher. „Aus unserer Sicht entsteht da ein neuer Markt. Und in den wollen wir uns einbringen.“ •
„Wir müssen uns mit weniger Schnittstellen herumschlagen“

Herr Martin, den Griff in die Kiste gibt es in der Industrie seit Jahrzehnten. Immer wieder wird er neu erfunden. Warum?
Der Griff in die Kiste wird nicht ständig neu erfunden. Die Hilfsmittel dazu werden weiter entwickelt, wir befinden uns in einem kontinuierlichen Verbesserungsprozess. Es gibt immer wieder neue Techniken, die uns ein Stück weiter bringen.
Mit dem neuen 3D-Area-Sensor will Fanuc beim Griff in die Kiste ein neues Kapitel aufschlagen. Wie würden Sie diesen Fortschritt umschreiben?
Aus meiner Sicht ist es Fanuc mit dem Sensor erstmals gelungen, ein praxistaugliches System anzubieten, das sich mit einem überschaubaren Aufwand installieren lässt. Wenn man diese Hürde geschafft hat, dann läuft das System sicher und stabil.
Kann der Anwender das System allein aufsetzen?
Nein, die erste Inbetriebnahme erfolgt durch das Systemhaus. Das ist eben nicht so einfach wie die Konfiguration eines iPads.
Warum ist der Sensor oberhalb der Kiste montiert?
Der ideale Sensor wäre am Roboter montiert und so klein, dass man ihn gar nicht mehr sieht. Aber das nur nebenbei, so weit sind wir noch nicht. Die Montage oberhalb der Kiste hat den Vorteil, dass der Sensor das nächste Teil schon suchen kann, während der Roboter mit etwas anderem beschäftigt ist.
Und den Nachteil, dass man für mehrere Kisten auch mehrere Sensoren braucht?
Das ist leider nicht zu ändern.
Was war die zentrale Herausforderung bei der Entwicklung des Sensors?
Einmal war es nicht einfach, die ganze Technik in einem mobilen Gehäuse unterzubringen, das sich leicht montieren lässt. Und zweitens: Wie entwickle ich aus der Masse der gelieferten Daten ein Verfahren, um an das nächste Teil zu kommen? Es geht nicht nur um Erkennung, sondern auch um Strategie: Welches Teil nehme ich? Und wie kriege ich es aus der Kiste heraus?
Bei der Entwicklung von komplexen Strategien spielt die Rechenleistung eine zentrale Rolle. Treiben am Ende die Prozessorhersteller den Griff in die Kiste voran?
Nein. Rechenleistung ist hilfreich und auch notwendig. Aber am Ende kommt es darauf an, wie man die leistungsstarken Prozessoren nutzt. Rechenleistung macht das Ganze sicher schneller, aber die Lösung selbst ist damit nicht automatisch gegeben.
Fanuc ist seit 25 Jahren in der Bildverarbeitung zuhause und hat die Vision-Technik vollständig in die Robotersteuerung integriert. Ist das ein Alleinstellungsmerkmal?
Mir sind keine anderen Systeme bekannt, die so tief integriert sind. Wir als Systempartner profitieren davon, denn wir müssen uns bei unserer täglichen Arbeit mit weniger Schnittstellen herumschlagen. (ub) •
Teilen:








{kind=link}