
Wissenschaftler der Uni Bremen entwickeln Strategien, mit denen sich Roboter im All und auf fremden Planten zurecht finden sollen. Sollten die stählernen Gesellen wider Erwarten in der Klemme sitzen, gibt es sogar einen Plan B.
Greifen, heben, schrauben – Roboter sollen an menschenfeindlichen Orten wie dem Weltraum selbstständig knifflige Aufgaben lösen. Dafür haben das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) und die Arbeitsgruppe Robotik an der Universität Bremen neue Methoden für ein- und zweiarmige Manipulationen entwickelt. Das Besondere an dem abgeschlossen Projekt Behaviours for Mobile Manipulation (BesMan) ist, dass die erarbeiteten Verfahren unabhängig von der Gestalt des Roboters funktionieren. Es kann sich bei den Modellen um menschenähnliche Systemen oder mehrbeinige Kletterroboter handeln. Mit der neuen Technik können Roboter nicht nur unterschiedliche Objekte manipulieren, sondern auch flexibel auf unvorhergesehene Situationen reagieren, ohne dass der Mensch dabei eingreifen muss. Darüber hinaus entwickelten die Bremer Forscher eine maschinelle Lernplattform, mit der der Roboter situationsspezifische Verhaltensweisen lernen kann, die er über eine Schnittstelle zum Menschen einstudiert.
Für den Einsatz auf fremden Planeten müssen die Roboter nach Ansicht der Bremer Spezialisten aber nicht nur motorisch fit sein, sondern auch flexibel auf unvorhersehbare Situationen reagieren können. Auch dabei helfen die im Projekt Bes-Man entwickelten Steuerverfahren, die nach dem Prinzip eines Baukastens funktionieren. Eine Reihe von Verhaltensstrategien hat die Maschine bei der Reise ins All bereits im Gepäck. Dazu gehören zum Beispiel Muster zum Greifen und Heben von Objekten. Je nach Situation oder Aufgabe schmiedet der Roboter einen gesonderten Plan und wählt die jeweils passenden Verhaltensweisen aus. Auf diese Weise soll er sich selbst aus schwierigen Situationen befreien und eigenständig neue Aufgaben meistern können.
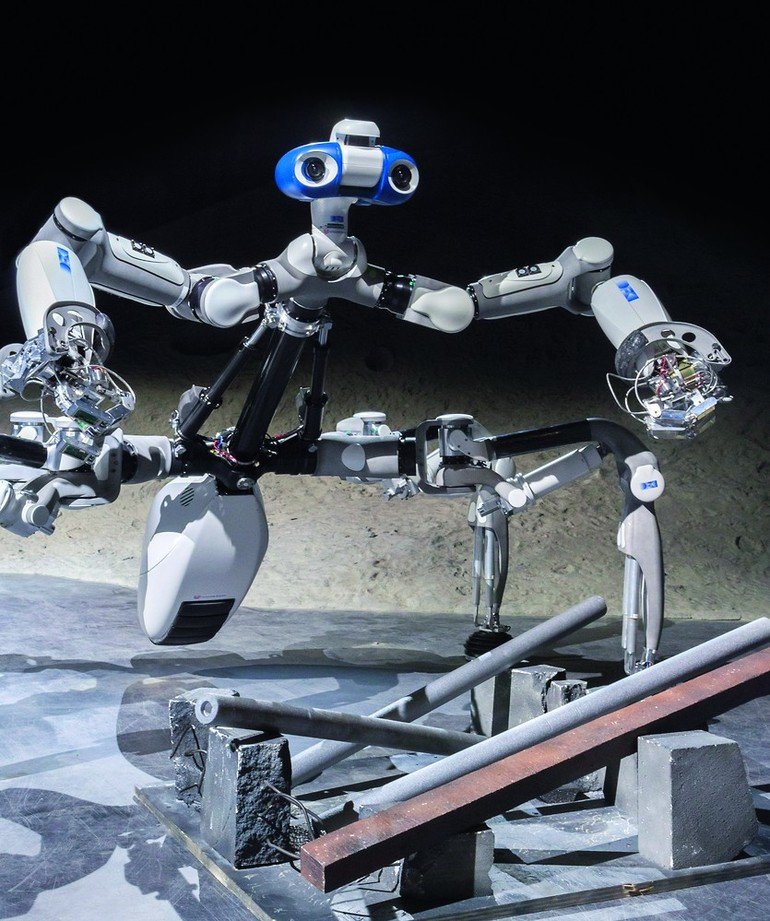
Sollte ihm das nicht gelingen, kommt die Lernplattform zum Einsatz. Auf der Erde macht der Mensch Bewegungen im Labor vor, die dem Roboter in der Fremde aus der Klemme helfen können. Sogenannte Motion-Tracking-Kameras zeichnen die Gebärden auf, woraufhin die Lernplattform den Bewegungsablauf automatisch in einzelne Segmente zerlegt. In einer Simulation wird die Abfolge schließlich reproduziert, erlernt und an die Anforderungen des Systems angepasst, bevor sie auf den Roboter im All übertragen wird. Dieser führt schließlich die Handlung aus und übernimmt die neue Bewegung in sein Verhaltensrepertoire. So jedenfalls lautet der Plan. Die lernfähige Software testeten die Wissenschaftler an verschiedenen DFKI-Robotersystemen, etwa an dem nachgiebigen Roboterarm Compi, der humanoiden Roboterdame Aila und dem sechsbeinigen Laufroboter Mantis.
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:








{kind=link}