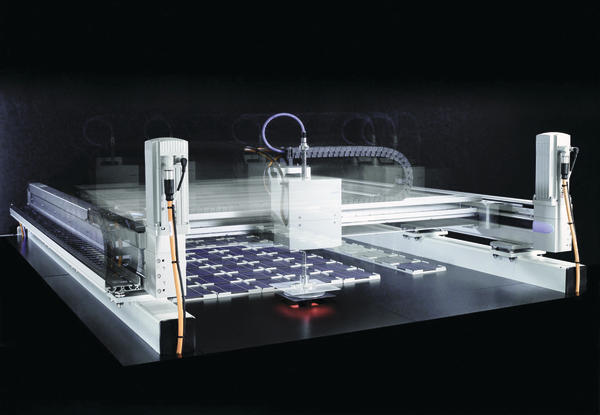
Das H-Portal ist rund 30 % schneller als konventionelle, kartesische Handling-Methoden trotz vergleichbarer Einstiegskosten. Festo entwickelte die Technik für dynamische Montagevorgänge in der Photovoltaik und Elektronik.
Das neue Raum-Flächenportal soll dort zum Einsatz kommen, wo kleine und leichte Massenartikel schnell und flexibel positioniert werden müssen. Das Modell deckt einen deutlich größeren Arbeitsraum in Rechteckform ab als Robotersysteme in Delta-Kinematik, die nur kreisrunde oder nierenförmige Arbeitsräume bearbeiten können. Nachteilig an vielen Delta-Robotern sind auch die hohen Kosten, die zu installierende Masse von rund 150 kg und der hohe Montageraum. Im Vergleich dazu ist das H-Portal sehr flach, hat einen niedrigen Schwerpunkt und ein einfacheres Gestell als schnelle Delta-Roboter. Das optimierte Beschleunigungs- und Abbremsverhalten ermöglicht eine Genauigkeit von 0,1 mm beim Saugen und Greifen.
Die Geschwindigkeit von 5 m/s und die Beschleunigung von 50 m/s² erreicht das Modell über einen konstruktiven Kniff: Die beiden EGC-Zahnriemenachsen sind mit der Traverse über einen einzigen umlaufenden Zahnriemen um die Antriebswelle verbunden. Dieser wird von zwei Servomotoren angetrieben. Positiver Nebeneffekt: In der Fläche mit ihren zwei Freiheitsgraden muss kein Motor mit bewegt werden. Reduzierte Massen ermöglichen schnelle und dynamische Bewegungen und führen zu weniger Verschleiß.
Raffiniert ist auch das Hub-Dreh-Modul. Es besteht aus einer Pinole mit integrierter Energiedurchführung für das Front-End-Modul und bildet die Z-Achse, an der die Greifeinheit angebracht ist. Das Hub-Dreh-Modul beschleunigt mit 20 m/s² auf eine Geschwindigkeit von 1,5 m/s.
Werkstücke wie siliziumbasierte Wafer lassen sich berührungslos aufnehmen. Dafür wird am Bernoulli-Greifer ein Überdruck angelegt. Gleichzeitig wird an der zu greifenden Fläche ein Unterdruck zum Ansaugen des Wafers erzeugt. Dadurch wird das Werkstück insgesamt an den Greifer gezogen, bis die Gewichtskraft, die Kraft des Staudrucks aus der Düse und die anziehende Kraft aus dem Beschleunigungsimpuls des Fluids im Gleichgewicht stehen. Es stellt sich dabei ein Abstand zwischen 0,5 und 3 mm zwischen Greifer und Grifffläche des Bauteils ein, so dass das Objekt berührungslos gehalten wird.
Festo, Esslingen, Tel.( 0711) 3470
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:







{kind=link}