
An Bord der internationalen Raumstation ISS wurde der erste humanoide Roboter-Astronaut in Betrieb genommen. Das Modell ist mit einer ausgeklügelten Bildverarbeitung ausgestattet, die auf der Standardsoftware Halcon des Vision-Spezialisten MVTec aus München basiert.
Während der Mission STS-133 fand der letzte Einsatz des lang gedienten Spaceshuttles Discovery statt. An Bord dieses Fluges war der Robonaut R2. Der Roboter wurde im August 2011 an Bord der ISS erfolgreich getestet und unterstützt seither die Astronauten bei ihrer Arbeit. Das Einmotten der Spaceshuttles markiert gleichzeitig den Beginn der Ära der Roboter-Astronauten. Diese werden die Arbeit der Menschen im All und in der Schwerelosigkeit in Zukunft komplett verändern.
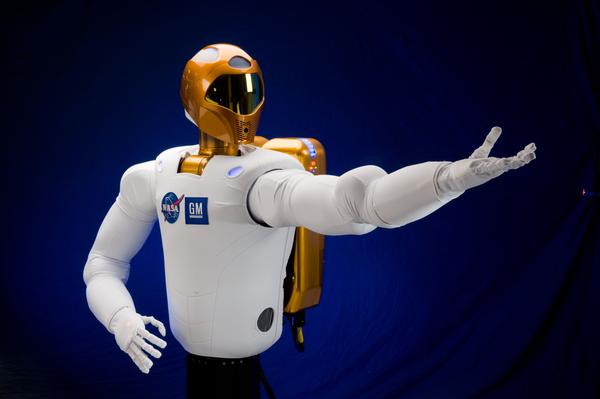
Die amerikanische Raumfahrtbehörde Nasa und General Motors (GM) haben den Robonaut 2 (R2) gemeinsam entwickelt. Die humanoide Maschine wurde in der Schwerelosigkeit getestet und besitzt mehr Fähigkeiten als jedes andere Gerät, das zuvor unter diesen Umständen im Einsatz war. Der stählerne Astronaut ist mit einem Vision-System ausgestattet, das in Deutschland entwickelt wurde. Die komplexen Algorithmen, mit denen R2 sehen und blitzschnell entscheiden kann, basieren auf der Bildverarbeitungs-Software Halcon des bayrischen Vision-Spezialisten MVTec.
Der menschenähnliche Torso des Roboters wiegt rund 150 kg. Mit einer Schulterbreite von etwa 1,10 m und einem helmartigen goldenen Kopf erinnert er an Modelle aus den Hollywood-Studios. Die Proportionen des Kopfs, des Oberkörpers und der Arme orientieren sich nah am menschlichen Körper. Beine allerdings fehlen dem Roboter, denn in der Schwerelosigkeit braucht er keine. Vielmehr ist die Maschine an einem festen Gerüst montiert.
Die Techniker bei der Nasa und GM haben viele Jahre an dem Modell gearbeitet. Dabei hat den Ingenieuren vor allem die Programmierung große Schwierigkeiten bereitet, denn der Entwicklungsaufwand für die Vision-Software war hoch. Zudem mussten die Programme ausgiebig getestet werden. Erst durch den Einsatz einer Standardsoftware ließen sich die Probleme schließlich lösen. Grundlage war das Vision-Paket Halcon 9.0. Zum Einsatz kam dabei auch eine spezielle Entwicklungsumgebung.
R2 kann nicht nur die tägliche Arbeit der menschlichen Astronauten an Bord der ISS unterstützen. Das Modell ist auch dafür konzipiert, manuelle Routinearbeiten in der Industrie durchzuführen, wie sie beispielsweise in der Automobilproduktion anfallen. Im Gegensatz zum menschlichen Kollegen ermüdet der R2 nicht. Dies ist zugleich ein Sicherheitsvorteil und empfiehlt den Robonauten auch für hochgradig gefährliche Arbeiten. Hierzu zählt vor allem eine so genannte EVA (Extra Vehicular Activity). Bei diesen Außenbordarbeiten an Raumfahrzeugen sind die Astronauten erheblichen Belastungen ausgesetzt.
Das Modell R2 verfügt über ein so genanntes „Flexible Vision System“. Dieses kombiniert zwei Kameras für einen Stereoaufbau mit einer weiteren Kamera zur Distanzmessung. Damit kann der R2 auf der ISS Objekte automatisch erkennen und deren Lage bestimmen. Bei der Objekterkennung müssen komplexe Muster in der Umgebung des Roboters erkannt werden. Hierbei kommen unterschiedliche Sensortypen zum Einsatz. Die Bilder können aufgrund der Datenlast auf einem herkömmlichen Rechner praktisch nicht verarbeitet werden. Deswegen wird die Objekterkennung auf kleine, ausgesuchte Regionen in den Stereobildpaaren beschränkt. Bei der Auswahl dieser Regionen – in der Fachsprache ROI (Region of Interest) genannt – werden Bildinformationen wie Farbe, Intensität oder Textur herangezogen.
„Die Nasa hat sich für das System Halcon entschieden, damit die unterschiedlichen Sensordaten und komplexen Verarbeitungsschritte in einer Entwicklungsumgebung integriert werden können“, sagt Brian Hargrave, Robonaut ISS Applications Lead bei der Robotics & Automation Group from Oceaneering Space Systems in Houston. Für die Stereo-Bilderfassung werden zwei Kameras des Herstellers Allied Vision aus Stadtroda eingesetzt. „Das System Halcon unterstützt den GigE-Standard, wodurch sich die Kameras softwaretechnisch schnell anbinden lassen“, so Hargrave. Die Tast- und Positionssensoren der Finger des Roboters sind maßgeschneidert entworfen und hergestellt und können Tiefenmessungen sowie Tast-Objekterkennungen durchführen. „Mit Halcon konnten wir jeden bereits existierenden Code in die Entwicklungsumgebung importieren und diese für das Rapid Prototyping unserer Applikationen einsetzen“, freut sich Hargrave.
Von den vielen geplanten Aufgaben für den R2 auf der ISS ist das Erkennen und Manipulieren von Textilmaterial die größte Herausforderung. Diese Tätigkeit erfordert einen hohen Grad an Koordination beim Tasten und Manipulieren. Beispielsweise wird eine Textilbox aus flexiblem Mehrlagenstoff genutzt, um ein Werkzeug-Set für eine EVA aufzubewahren. Diese Box muss erkannt, geöffnet und wieder geschlossen werden. Eine Schwierigkeit dabei ist, dass der Deckel des Stoffbehälters dazu tendiert, in der Schwerelosigkeit umher zu schweben, auch wenn der Behälter an seiner Basis gesichert ist. Der Deckel kann sich dabei in unvorhersehbarer Weise zusammenfalten. Die Lagebestimmung des Deckels und die entsprechende Greifplanung waren eine große Herausforderung.
„Halcon bietet viele Möglichkeiten, um die Manipulation der Textilbox erfolgreich durchzuführen“, versichert Hargrave. Bei der Definition der ROI wird die Textursegmentierung von Halcon genutzt. Der Deckel der Textilbox wird mit Schnappern und Ösen geschlossen. Diese Elemente werden mit der so genannten formbasierter Matching-Technologie in den Bildpaaren gefunden. Das Ganze funktioniert – auch wenn sich die Ösen in jeder erdenklichen Position befinden können, wenn der Deckel umherschwebt. Dies ist nur ein Beispiel, wie mit den Algorithmen von MVTec die komplexen Probleme auf der ISS gelöst werden. Dabei half den Spezialisten von der Nasa vor allem die integrierte Entwicklungsumgebung. Aus allen Sensor- und Vision-Daten lassen sich damit realistische Greifpunkte ermittelt, damit der Roboter beispielsweise den Deckel erkennen, ausfalten und schließen kann. Ein weiteres Beispiel ist die Erfassung und Detektion von Schalterpositionen, die der R2 selbst bedienen soll.
Der Robonaut R2 ist der erste Schritt in die Ära der Roboter-Astronauten. Zunächst soll das Modell innerhalb der ISS und später zu Außenarbeiten an der ISS eingesetzt werden. Doch dabei soll es nicht bleiben. Im so genannten Projekt M wird darüber nachgedacht, wie ein Folgemodell des R2 innerhalb von tausend Tagen (M ist das römische Zeichen für 1000) auf den Mond gebracht werden kann. Die Weiterentwicklung des R2 soll bis dahin selbständig gehen können und soll mit einer kleinen Landeeinheit zum Mond gebracht werden. Die Landeeinheit ist dabei mit umweltfreundlichem Treibstoff bestückt wie Methan und Sauerstoff. Die Landung selbst erfolgt vollkommen autonom. Der stählerne Astronaut wird dann die Mondoberfläche betreten, erkunden und verschiedene Aufgaben erfüllen. Dazu gehören wissenschaftliche Tätigkeiten und kleine Experimente, die von Studenten entwickelt worden sind. ub
Teilen:






{kind=link}