Es gibt einen neuen Trend in der Robotertechnik. Menschen sollen in Zukunft Hand in Hand mit Robotern zusammen arbeiten können. Und das sicher ohne trennende Wände oder Schutzzäune. Das verspricht der Wirtschaft neue Perspektiven hinsichtlich Automation und zudem flexiblere Fertigungsmöglichkeiten. Vor allem ließe sich der Automationsgrad je nach Aufgabenstellung variabel gestalten. Einen Blick in diese nicht mehr allzu ferne Zukunft konnten Interessenten an der TU Dortmund während der Fachtagung „Mensch-Roboter-Kooperation“ im Rahmen des Projekts rorarob werfen.
Im Rahmen des rorarob-Projektes wollen die beteiligten Unternehmen aus Industrie und Forschung ein Assistenzsystem zum Schweißen und Bearbeiten komplexer Baugruppen in der Rohr- und Rahmenfertigung entwickeln. Die hierbei gewonnenen Erkenntnisse hinsichtlich direkter Zusammenarbeit zwischen Mensch und Roboter lassen sich jederzeit auf andere Anwendungen übertragen.
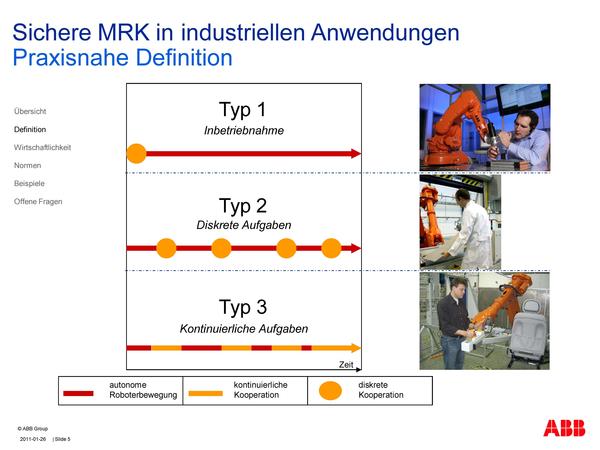
Dr. Björn Matthias, Senior Principal Scientist „Robotic Automation“ im ABB Forschungszentrum in Ladenburg, stellte als einer der Gastredner die Mensch-Roboter-Kooperation, kurz MRK, in Bezug auf das Normenwesen dar. Normen bündeln Erfahrungen aus der Praxis und sind Umsetzungshilfe für die Konstruktion und Ausführung von Maschinen oder Anlagen gemäß der Maschinenrichtlinie. Im Fall der Mensch-Roboter-Kooperation greift hier unter anderem die ISO 10218. Sie ist laut Matthias in überarbeiteter Form fertig gestellt. Er verweist aber ausdrücklich darauf, dass die normgerechte technische Gestaltung oder die Anwendung der Norm per se nicht ausreicht, denn nach der neuen Maschinenrichtlinie ist eine ausführliche Dokumentation Pflicht, will man ein Produkt in den Verkehr bringen. Dazu ist vor allem bei MRK-Projekten im Vorfeld eine sorgfältige Risikobeurteilung erforderlich. Ein kurzer Rückblick auf den Status quo soll das veranschaulichen.
Industrieroboter montieren und verschweißen Fahrzeugrahmen, lackieren Karosserieoberflächen oder Möbel, bestücken Maschinen, entgraten und schleifen faserverstärkte Kunststoffteile oder sortieren, verpacken und palettieren Güter. Diese Auswahl umfasst nur einen Bruchteil der heute realisierten Roboteranwendungen. In vielen industriellen Prozessen sind sie sogar alternativlos, da Menschen hier aufgrund der zu handhabenden Massen oder wegen der Belastungen durch Hitze, Lärm und Staub nicht arbeiten können oder dürfen. Weiter ist robotergestützte Automation unverzichtbar, wo der Mensch selbst aufgrund der hygienischen Anforderungen eine Gefahrenquelle für das Produkt darstellt – beispielsweise in der Pharma- und Lebensmitteltechnik. Haare, Hautschuppen oder mikrobielle Verschleppung von Keimen sind typische Risiken, die sich mit Robotern vermeiden lassen.
Bei diesen Applikationen bewegen sich die Roboter heute aus Sicherheitsgründen noch ausschließlich in durch Trennwände, Schutzzäune oder Rolltore abgesicherten Arbeitsräumen. Werker haben zu ihnen nur für Umrüst- oder Wartungsarbeiten Zutritt. Dazu müssen die Roboter abgeschaltet oder von der Energieversorgung getrennt sein. Das ist zwar Stand der Technik, genügt aber nicht mehr den Anforderungen, die der Markt heute an produzierende Unternehmen stellt. Hier ist eine deutlich höhere Flexibilität erforderlich. Und die verlangt nach Arbeitsplätzen mit variabler Aufgabenverteilung zwischen manueller und robotergestützter Arbeit beziehungsweise nach einem Team aus Mensch und Roboter. Je nach Auftragslage, Auftragsvolumen oder Variantenzahl muss ein Produzent die Wahl haben, ob er die Teile rein manuell, hybrid, oder in vollautomatisierten Roboterlinien ohne menschliche Werker herstellt. Hybrid beschreibt dabei den Fall, dass Werker und Roboter gleichzeitig in einem gemeinsamen Arbeitsraum an einem Werkstück arbeiten. Doch diese Betriebsweise ist noch nicht Stand der Technik und erfordert seitens der Beteiligten ein grundlegendes Umdenken in Sachen Sicherheit.
Von sich schnell bewegenden Industrierobotern gehen aufgrund der Massen von Roboter, Greifer, Werkzeug und Werkstück erhebliche Gefahren für Leib und Leben der Mitarbeiter aus, falls sie in den Arbeitsbereich des Roboters geraten. Um solche Situationen auszuschließen, verbannte man die stählernen Helfer kurzer Hand in sichere, vom Menschen vollständig getrennte und durch Schutzwände, Zäune oder Rolltore abgeschirmte Arbeitsräume. Weiter galt es auszuschließen, dass die Roboter diese Trennungen durchfahren oder mit anderen Maschinen- und Anlagen innerhalb der Roboterzelle kollidieren können. Diese Sicherungsaufgabe übernahmen anfangs mechanische Anschläge oder auch elektromechanische Endschalter.
Ein wesentlicher Schritt zu mehr Sicherheit war dann die Einführung der ersten Sicherheitssteuerungen. Sie können die Ausführung der Roboterbewegung überprüfen und stellen Funktionen wie das sichere Begrenzen des Arbeitsbereichs und der Bewegungsgeschwindigkeit, Überwachen des Stillstands oder das gefahrlose manuelle Führen des Roboters bereit. Soweit es erforderlich ist, dass Werker dem Roboter Teile zureichen oder von ihm entgegennehmen, erfolgt dies über als Schleusen ausgebildete Übergabestationen, die einen direkten Kontakt ausschließen. Diese strikte Trennung von Mensch und Roboter hat sich bewährt und ist seitdem praktisch Gesetz. Sie kann aber nicht mehr Gesetz sein, will man kollaborierende Systeme von Mensch und Roboter realisieren.
Um eine direkte MRK gefahrlos zu ermöglichen, sind Aspekte zu berücksichtigen, die bisher keine Rolle spielten, weil sie dank der rigorosen Trennung ausgeschlossen waren. Dazu zählen Verletzungen durch Anprall, Stoß, Einziehen, Scherungen oder Quetschungen. Hier betreten die Roboterhersteller Neuland und es gilt, solide Daten über die biomechanischen Aspekte der unterschiedlichen Verletzungsarten zu erstellen. Weiter ist in Sachen Ergonomie hinsichtlich der Zusammenarbeit zwischen Roboter und Mensch noch einiges zu optimieren – und das setzt eine völlig neue Betrachtung des Umfelds voraus. Der wichtigste Aspekt ist dabei nach wie vor Sicherheit.
Aufgrund der bisher quasi als Gesetz geltenden Trennung der Arbeitsbereiche von Mensch und Roboter waren keine genauen Kenntnisse der biomechanischen Risiken beim Kontakt zwischen beiden erforderlich. Kontakt war einfach verboten. Das ist jetzt anders. Bei der angestrebten Kooperation sind solche Kontakte nicht nur möglich oder unvermeidbar, sie sind je nach Prozess und auszuführender Arbeit teilweise sogar notwendig. Vor diesem Hintergrund empfiehlt Entwicklungsexperte Matthias, nicht nur die Standards der Normen als Grundlage zu nehmen, sondern auch ausführlich zu dokumentieren, wie man mit dem System arbeiten will. Dabei sind viele Fragen zu klären: Welche Schritte kommen vor? Welche Personen kommen mit dem System in Kontakt? Was müssen diese Personen machen? Was kann bei der Ausführung schiefgehen? Möglicherweise zeigt eine solche Auswertung, dass potenzielle Bedienfehler ein wesentlich größeres Risikopotenzial darstellen. Ein weiteres Risiko sieht Matthias in der technischen Umsetzung selbst, denn auch die kann fehlerbehaftet sein, obwohl die einzelnen Prozesse für sich gesehen korrekt ablaufen. Normen sind als Basis und Mindestvoraussetzung zu betrachten – im Einzelfall macht es aber Sinn, nach bestem Wissen über diese Standards hinaus zu gehen.
So beschreibt die ISO 10218–1 beispielsweise in Abschnitt 5.10 vier Standardsituationen des kollaborierenden Betriebes: Stopp mit überwachtem Stillstand, Handführung des Roboters, Überwachen von Geschwindigkeit und Abstand sowie Begrenzen von Leistung und Kraft. Im realen Betrieb dürfte jedoch kaum dieser Betriebsarten in Reinform vorkommen. Viel eher ist anzunehmen, dass eine Mischung aus mehreren dieser Betriebsmodi auftritt. Die Frage ist daher: Welche Verletzungsrisiken könnten unter realen Bedingungen am häufigsten auftreten? Statistisch sind das Stoß und Quetschung. Um deren Auswirkungen auf den Menschen zu mindern, gibt es ein paar generelle konstruktive Maßnahmen wie das Abrunden von Ecken und Kanten sowie das Polstern der Oberflächen von Robotern.
Weiter dürfen sich Roboter in der Nähe von Menschen nur mit reduzierter Geschwindigkeit bewegen. Diese Geschwindigkeit muss nicht zwangsläufig 250 mm pro Sekunde (9 km/h) betragen, wie oft zitiert. Ausschlaggebend ist vielmehr die in der Gefährdungsanalyse als maximal zulässig ermittelte Geschwindigkeit. Hier ist noch viel Grundlagenarbeit zu leisten. So wäre das dynamische Verringern der Robotergeschwindigkeit eine sinnvolle Option, je nachdem, wie nah der Werker dem Einflussbereich des Roboters kommt. Forscher arbeiten zudem bereits an Modellen, die wahrscheinliche Bewegungen des Werkers im Arbeitsraum des Roboters vorhersagen, um Geschwindigkeit oder alternativ die Bahn des Roboters anzupassen.
Die höchsten Sicherheitsanforderungen gelten jedoch, wenn Roboter und Mensch eng zusammenarbeiten, wie beim Montieren oder Schweißen. Während der Mensch schweißt oder Teile montiert, hat er in der Regel ein eingeengtes Sichtfeld. Während der Roboter das Teil bewegt oder in die bestmögliche Position dreht, ist Kontakt nicht auszuschließen und muss daher jederzeit gefahrenfrei sein. Das heißt: Die Kinematik des Roboters muss situationsbedingt Leistung und Kraft begrenzen können. Und das in Echtzeit. Damit steigen die Anforderungen an die sensorische Erfassung der Arbeitsbereiche, an sicherheitsgerichteter Logik und an intelligenter Software.
Hans P. Fritsche Fachjournalist in Gernsheim
Teilen:








{kind=link}