


Erste Lösungsansätze für den so genannten Griff in die Kiste, also die roboterbasierte Vereinzelung chaotisch bereitgestellter Objekte, wurden bereits Mitte der 80er-Jahre entwickelt. Allerdings gab es bis dato keine zufriedenstellende, universelle Lösung. Mit dem iRob Feeder bringt das Forschungsunternehmen Profactor nun ein kompaktes Gesamtsystem auf den Markt, bei dem Roboter von Stäubli eine wesentliche Rolle spielen.
Der berühmte Griff in die Kiste gilt als eine Königsdisziplin im Bereich der industriellen Bildverarbeitung. Vision-Systeme sind auch im Forschungsunternehmen Profactor ein Schwerpunktthema. Es war daher nur eine Frage der Zeit, wann sich die Österreicher mit dem Griff in die Kiste beschäftigen würden. „Wir haben früh erkannt, dass gerade die 3D-Bildverarbeitung ein Schlüsselelement für den Griff in die Kiste ist“, sagt Dr. Andreas Pichler, technischer Geschäftsführer bei Profactor. Wenn Teile in einem Schüttgutszenario mit dynamischer Störkulisse erkannt werden sollen, dann müsse man exakt bestimmen können, wo sich die Teile im Raum befinden und wie die aktuelle Störkulisse aussieht. Das sei nur mit 3D-Bildverarbeitung realisierbar.
Bei Start des Projekts vor drei Jahren entschied man sich, in der Robotik auf den Hersteller Stäubli zu setzen. „Wir waren mit den Modellen von Stäubli in vergangenen Projekten stets zufrieden“, begründet Armin Völkl-Leitner, Vertrieb industrielle Automation und Robotik bei Profactor, die Entscheidung. „Zudem waren wir wegen der kontinuierlichen Zusammenarbeit mit den Robotern, der Steuerung und der Software bereits bestens vertraut.“
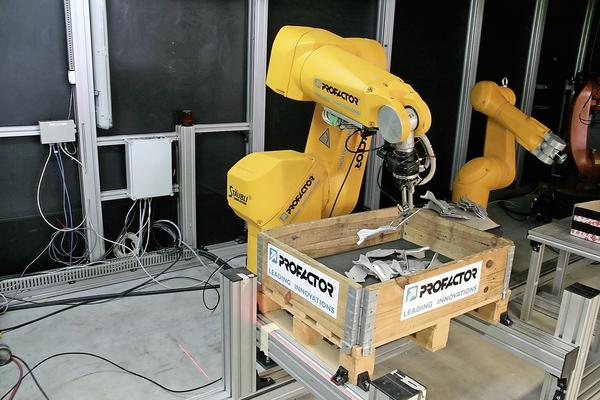
Da man für die Umsetzung einen beweglichen, schnellen Roboter suchte, der zudem wenig Platz braucht, wählte man den Sechsachser RX160 aus der Stäubli-Roboterfamilie. „Das Modell besitzt einen Gelenkarm mit sechs Freiheitsgraden für hohe Flexibilität“, umschreibt Alexander Müller, Stäubli-Verkaufsleiter für Österreich, die Vorteile des Roboters. „Der kugelförmige Arbeitsbereich bietet eine optimale Ausnutzung der Roboterzelle.“ Hohe Präzision und Dynamik sowie eine maximale Tragkraft von 30 kg sind weitere Eigenschaften des Modells, die bei dem Projekt von Vorteil sind. Zu Beginn der Entwicklungsphase setzte man sich gemeinsam mit Systemintegratoren an einen Tisch und legte fest, worauf es bei der Endlösung ankommt. Das Ziel war, ein Produkt mit überschaubaren Anschaffungskosten auf den Markt zu bringen, das sich einfach in bestehende Produktionslinien integrieren lässt. Minimale Rüstzeiten und einfaches Konfigurieren waren weitere Systemvoraussetzungen.
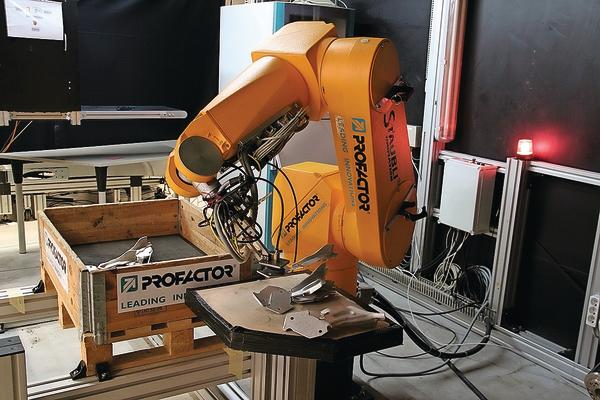
Nach drei Jahren Entwicklung können die Österreicher nun mit dem iRob Feeder eine stabile und kompakte Gesamtlösung für das individuelle Bestücken von Industrieanlagen mit Robotern präsentieren. Das System erkennt unterschiedliche Werkstücke in verschiedenen Lagen, greift sie und positioniert sie richtig für die Weiterverarbeitung. Das System generiert also aus einer chaotischen Teilebereitstellung eine geordnete Prozesszuführung. Eine Herausforderung dabei war, die Stabilität des Systems nicht nur unter Labor-, sondern auch unter Industriebedingungen zu gewährleisten. „Die Zusammenarbeit mit den Spezialisten von Stäubli war da sehr hilfreich“, versichert Andreas Pichler.
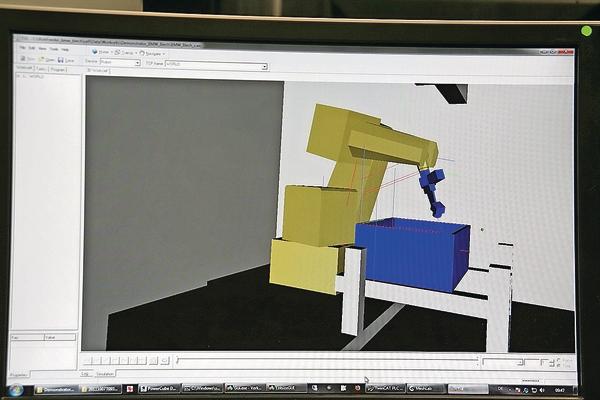
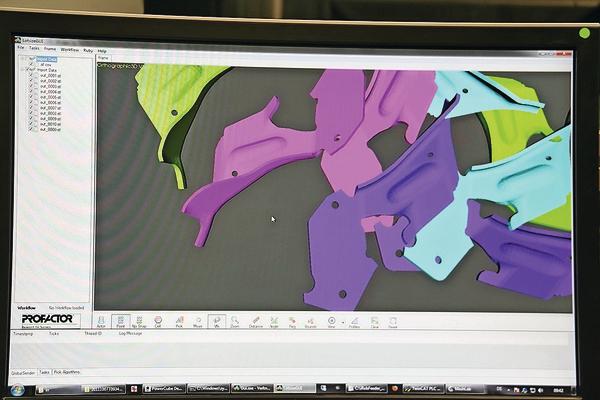
Der wesentliche Vorteil der Industrielösung ist, dass die einzelnen Teile nicht mehr sortenrein geschlichtet zur Anlage geliefert werden müssen. Da der iRob Feeder die 3D-Lage der Werkstücke auch in nicht standardisierten Umgebungen erkennt, ist eine zeitlich aufwendige Teile- und Arbeitsraumvorbereitung nicht notwendig. „Unsere Software bildet die komplette Arbeitszelle mit den chaotisch angeordneten Teilen und dem Roboter inklusive Greifer zuerst digital ab und kreiert dann eine Simulationsumgebung“, erklärt Pichler. Dafür werden Lasersensoren eingesetzt, die die Oberfläche des Arbeitsraums abasten. Um in der daraus resultierenden Punktewolke auch Werkstücke erfolgreich zu erkennen, werden vorher CAD-Modelle der zu greifenden Teile hinterlegt.
Im nächsten Schritt berechnet das Systems unter Berücksichtigung der Roboterkinematik und der vorliegenden Störkulisse, welche Werkstücke aus dem chaotischen Haufen greifbar sind. „Das ist nur möglich, weil man zum CAD-Modell zusätzliches Prozesswissen wie beispielsweise Greifpunkte der Teile ablegen kann“, so Pichler. Nach der Selektion der idealen Greifpunkte und des optimalen Greifertyps muss noch der korrekte Roboterpfad aus der Kiste zum Ablegeplatz berechnet werden. Der Roboter verarbeitet alle Daten, die ihm zuvor durch ein Abbild der Ist-Situation vermittelt worden sind. Sobald er weiß, um welche Teile es sich handelt und in welcher Lage sich diese befinden, greift er zu und platziert sie für die Weiterverarbeitung. Mit dem neuen System lassen sich Schüttgutszenarien exakt nachbilden und Greifprozesse aus der Kiste komplett simulieren. „Wir bieten diese Machbarkeitsstudien auch als Dienstleistung an und die Nachfrage danach wird immer größer“, erläutert Armin Völkl-Leitner. Er sieht zudem einen Trend hin zum flexiblen Einsatz des neuen Systems beim Handling von schwankenden Losgrößen auch bei komplexen Baugruppen. Bei solchen Anwendungen geht es darum, ein System relativ rasch umzurüsten: „Der Anwender möchte schnell und ohne viel Programmieraufwand seine Anlage umzurüsten können. Das ist durch das Einspielen von neuen CAD-Modellen in unser System möglich.“ Durch die Simulationsunterstützung erhalte der Bediener die Information, ob und wie der neue Prozess stabil ausgeführt werden kann.
Die smarte Handhabungslösung bewährt sich momentan in einigen Referenzprojekten in der Automobilindustrie. Es gäbe aber nach eigenen Angaben genügend Anwendungsfälle in anderen Branchen, wo das System erfolgreich eingesetzt werden könnte. Verkaufsleiter Alexander Müller ist überzeugt: „Durch den Griff in die Kiste sind neue, intelligentere und produktivere Anlagenkonzepte realisierbar. Die Spezialisten von Stäubli sind in vielen Branchen unterwegs und haben deswegen den nötigen Einblick, um Potenziale aufzuspüren“. ub
Viel Know-how in der Bildverarbeitung
Das Forschungsunternehmen Profaktor
Die Profactor GmbH mit Sitz im österreichischen Steyr unterstützt Unternehmen dabei, ihre Produktivität zu erhöhen und gleichzeitig Kosten und Risiken zu senken. „Wir entwickeln und optimieren industrielle Produktionstechniken und helfen, Fehlentscheidungen zu vermeiden und den Planungsaufwand zu reduzieren“, so Dr. Andreas Pichler, technischer Geschäftsführer bei Profactor. Innerhalb weniger Jahre ist die 1995 gegründete Profactor GmbH vom Vier-Mann-Forschungsteam zu Österreichs Nummer eins in der angewandten Produktionsforschung gewachsen. Heute arbeiten 85 Mitarbeiter in den drei Bereichen Forschung und Entwicklung, Labordienstleistungen und Engineering. Zu den Schwerpunkten der Österreicher zählen neben Nanotechnologie, Energieeffizienz, Null-Fehler-Produktion auch Konzepte für das so genannte Human Centered Manufacturing, die humanere Gestaltung des Arbeitsplatzes. „Dabei bieten Roboter und Vision-Systeme wesentliche Optimierungsmöglichkeiten“, meint Pichler. „Daher beschäftigen wir uns seit acht Jahren mit der industriellen 3D-Bildverarbeitung und haben auf diesem Gebiet viel Know-how aufgebaut.“
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:








{kind=link}