Simulation | Die Voith GmbH machte mit einem Programmpaket auf sich aufmerksam, das Kollisionen bei Robotern verhindert, die räumlich eng zusammenarbeiten. Zudem lassen sich mit der Software die Taktzeiten minimieren.
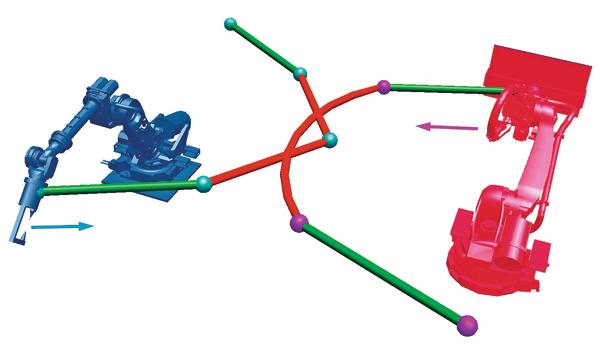
Wenn Roboter zusammenarbeiten, noch dazu in einer räumlich begrenzten Zelle, dann kann es schon mal eng zugehen und die Gefahr einer Kollision wächst. Mit dem Softwaresystem der Spezialisten aus Chemnitz lässt sich die Kollisionsfreiheit beim Einsatz von räumlich benachbarten, kooperierenden Robotern mit gemeinsamen Arbeitsräumen absichern. Außerdem kann der Nutzer mit dem Programmpaket minimale Taktzeiten ermitteln. Dabei werden alle kollisionsgefährdeten Roboterbahnabschnitte unabhängig vom regulären zeitlich gekoppelten Ablauf berechnet.
Die Roboterbahnen inklusive der kritischen Abschnitte werden praxisnah und übersichtlich visualisiert. Ebenso die Abfolgen der Roboterprogramme sowie die Roboter- und Prozessverriegelungen. Weiterhin lassen sich Taktzeiten ermitteln oder nachbilden. Mit der Offline-Programmierung inklusive der Verriegelungs- und Taktzeitermittlung in der Planungsphase lassen sich Potenziale ermitteln, mit der sich Taktzeiten reduzieren lassen, ohne dass dabei die Produktion behindert wird. Als Hauptabsatzmärkte adressieren die Chemnitzer Anlagenbauer und die Automobilindustrie. (ub) •
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:








{kind=link}