Bisher war es ein Problem, unsortierte Teile aus Transportbehältern automatisch zu entnehmen. Mit dem neuen Sensor Shapescan3D gibt es jetzt eine flexible Lösung für den so genannten Griff in die Kiste. Auch Anwender ohne Expertenwissen sollen das System schnell installieren und in Betrieb nehmen können.
In der Automobil- und Fertigungsindustrie müssen ständig Teile aus Gitter- oder Palettenboxen entnommen und einer Montage- oder Bearbeitungsanlage zugeführt werden. Bisherige Verfahren, diesen Vorgang zu automatisieren, haben sich in der Praxis nach Ansicht des Vision-Spezialisten Isra meist nicht bewährt. Die manuelle Entnahme hat natürlich Nachteile, denn es muss Personal eingesetzt werden. Die eintönige Arbeit, bei der keine Fehler toleriert werden können, ist alles andere als zeitgemäß. Oft wird in eine mechanische Lösung investiert. Dabei werden Werkstücke von Rüttelförderern sortiert und mit aufwendigen Prozeduren zugeführt. Diese Verfahren sind teuer und unflexibel.
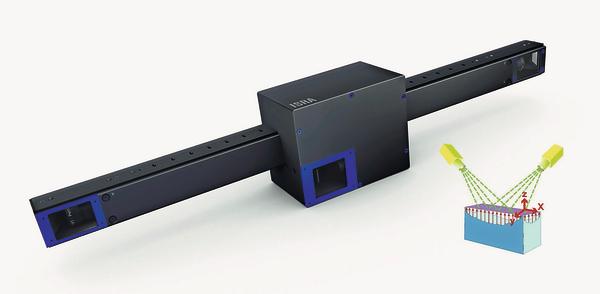
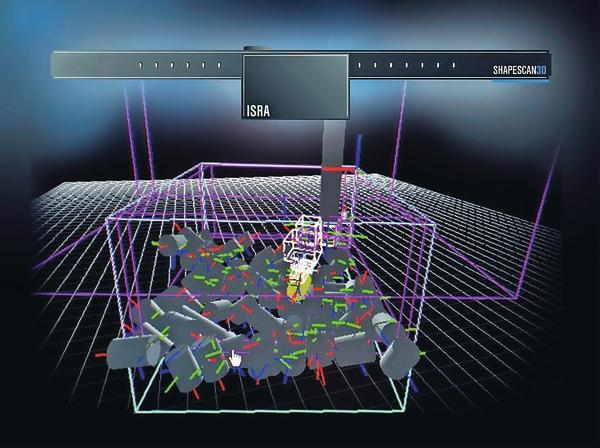
Vision-Systeme ermöglichen für diese Anwendung den Robotereinsatz. Der direkte „Griff in die Kiste“ (auf neudeutsch Bin Picking) bietet im Vergleich zur mechanischen Vereinzelung mehr Flexibilität bei der Variantenvielfalt der zur sortierenden Bauteile, denn es werden keine werkstückgebundene Sortierer benötigt. Praktische Anwendungen zeigen, dass der Bildverarbeitungs-Profi Isra mit seinen 3D-Sensoren den Griff in die Kiste gelöst hat. Mit dem Sensor Shapescan3D, der mit zwei Standardkameras und einer speziellen Beleuchtung ausgestattet ist, lässt sich die genaue Lage der einzelnen Teile in der Kiste bestimmen. Das gesamte Know-how für den automatisierten Griff in die Kiste stellt Isra über „Plug & Automate“ jetzt zur Verfügung. Der Anwender kann die Lösung selbst installieren und in Betrieb nehmen. Mit einfacher Parametrierung anstelle umständlicher Programmierung wird die 3D-Roboterführung gestartet.
Der Sensor wird stationär über der Kiste befestigt und hat dann standardmäßig Kisten in der Größe einer Europalette komplett im Blick. Eine Kinematik zum Verfahren des Sensors ist nicht notwendig. Das trägt auch zur Schnelligkeit des Systems bei. Die Scanzeit des Gesamtvolumens beträgt wenige Sekunden. Das System liefert dabei eine hohe Genauigkeit und kann flexibel für verschiedene Kistengrößen zum Einsatz kommen. Die Intelligenz der Sensorlösung steckt in der Software. Die Kameras scannen den Kisteninhalt und es entsteht eine 3D-Punktwolke, welche die zu erfassenden Objekte repräsentiert. Mit einer neuen Auswertungsmethode, dem so genannten 3D-Shape-Sampling, werden zunächst geometrische Primitive in der Punktewolke bestimmt. Die Software setzt dann komplexere Objekte aus diesen Primitiven zusammen. So können unterschiedlich geformte Objektteile sicher identifiziert werden. Eine robuste Erkennung der Teilegeometrie auch bei unsortierten Objekten ist nach eigenen Angaben gegeben. Bei der Bestimmung der Lage von Objektteilen in der Tiefe kommt die Laserlinienprojektion zum Einsatz. Diese Technik ermöglicht dem Sensor das Sehen in der dritten Dimension. Mit diesem „Tiefenblick“ kann der Roboter den Transportbehälter komplett leeren. Alle Bauteile in allen Tiefenlagen werden eindeutig zugeordnet und für den Roboter zugänglich gemacht. Dabei unterstützt ein Algorithmus den Kollisionsschutz zwischen Greifer und Kiste. Der Greifer kommt mit den Seitenwänden des Transportbehälters nicht in Berührung. Das Verfahren ist für den Einsatz in rauen Industrieumgebungen geeignet. ub
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:







{kind=link}