



Antriebstechnik | Den kleinen mobilen Roboter Youbot hat Kuka als Open-Source-Plattform für die Forschung und Lehre entwickelt. Hauptbestandteile sind die mobile Plattform und ein Roboterarm, angetrieben durch Systeme von Maxon Motor.
Anja Schütz Maxon Motor AG, Sachseln/Schweiz
Einem Roboter Schritt für Schritt etwas beizubringen und sich mit anderen über die eigens geschriebenen Programme auszutauschen, ist wohl für jeden Robotik-Studenten eine großartige Herausforderung. Um gerade die wissenschaftliche Forschung und Lehre zu unterstützen, hat der Roboterhersteller Kuka den Youbot entwickelt – einen per Open-Source-Software gesteuerten mobilen Manipulator mit omnidirektionaler Basis und einer Robotermechanik mit fünf Freiheitsgraden.
Knapp zwei Jahre nach Markteintritt gilt der Roboter als die Referenzplattform für die Forschung und Ausbildung im Bereich der mobilen Manipulation. Das bisher primär als Industrieroboterhersteller weltweit bekannte Augsburger Unternehmen hat damit eine Open-Source-Referenz-Plattform für die Robotikforschung geschaffen, die es Forschern, Entwicklern und Robotik-Studenten ermöglicht, ihre eigene Steuerungs- und Applikationssoftware zu schreiben, beispielsweise um Ikea-Tische zu montieren oder Kleinladungsträger und Bauteile in der „Fabrik der Zukunft“ zu transportieren.
Kukas Youbot besteht aus einem omnidirektional verfahrbaren Chassis und einem oder zwei darauf zu montierenden Roboterarmen. In das Chassis sind ein Industrie-PC und ein Akku integriert. Der Industrie-PC kommuniziert in Echtzeit (1 ms Takt) via Ethercat mit seinen insgesamt neun Antrieben, die in Strom-, Geschwindigkeits- und Positionsregelung betrieben werden können. Roboterplattform und Arm können auch unabhängig voneinander genutzt werden.
Das Youbot-Chassis ist nur 53 cm lang, 36 cm breit und knapp 11 cm hoch und bewegt sich auf vier Mecanum-Rädern fort. Die Lauffläche dieser speziellen Räder besteht aus Rollen, die im 45°-Winkel über den Radumfang verteilt sind. Dadurch kann der Youbot in jedem Moment translatorische und rotatorische Bewegungen beliebig überlagern. So werden omnidirektionale Bewegungen einschließlich Seitwärts- und Diagonalfahrten möglich.
Auf der Plattform ist ein rund 66 cm langer Arm montiert, an dessen Ende sich ein Greifer mit zwei Fingern befindet, mit denen der Roboter Gegenstände von einer Größe bis zu 70 mm und einem Gewicht von bis zu 500 g bewegen kann. Den Roboterarm bilden fünf Gelenke, die alle von Maxon-Antriebssystemen bewegt werden. Für diese Aufgabe werden Motor-Getriebe-Encoder-Kombinationen des Antriebsspezialisten eingesetzt.
Speziell entwickelte Planetengetriebe für maximale Bewegungsfreiheit
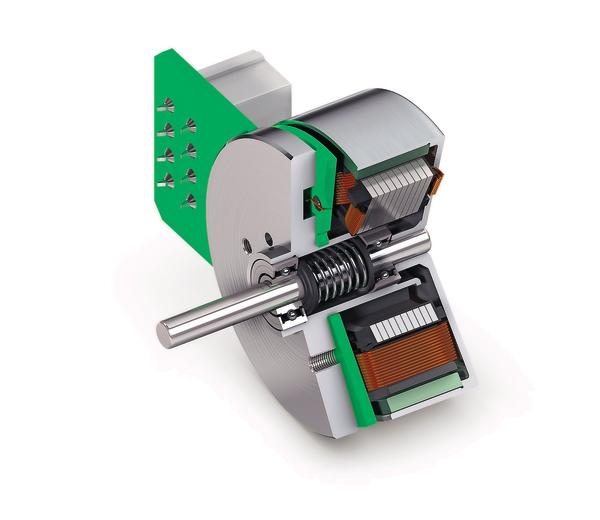
Der vorhandene Platz im Youbot ist begrenzt. Dennoch müssen im Arm und im Chassis mehrere Motoren und Planetengetriebe untergebracht werden. Aus diesem Grund sind diese Komponenten direkt in die Gelenke des Roboterarms integriert. Hierfür entwickelten Maxon und Kuka gemeinsam ein besonders leichtes, präzises und robustes Spezialgetriebe, bei dem sich das Gelenk um das Planetengetriebe herumdrehen kann.
Für die Gelenke des Roboterarms werden insgesamt fünf bürstenlose Flachmotoren (EC45 flat, EC32 flat) in Kombination mit Sondergetrieben und Encodern verwendet. Für die Plattform kommen vier bürstenlose EC 45 Flachmotor, ebenfalls von Maxon Motor, zum Einsatz. Der bürstenlose EC 45 flat zeichnet sich durch eine einfache Konstruktion mit hoher Drehmomentfestigkeit in kompakter Bauform aus. Die Flachmotoren haben eine Abgabeleistung von 15 bis 50 W, wiegen aber nur von 46 g bis 110 g. Die Gelenke des Roboterarms sind mit Maxon-Positionsgebern verbunden, um eine Winkelmessung der Gelenke zu ermöglichen.
Schon jetzt kann der Kuka Youbot als Meilenstein der Robotikforschung und -entwicklung bezeichnet werden. Kuka hat hier bewusst einen ganz neuen Weg beschritten, um den Forschungsmarkt zu adressieren und die Robotik-Community für Technologietransfers erreichen zu können. Denn gerade durch das Linux-basierte Open-Source-Konzept des Roboters sind Forschern und Wissenschaftlern keine Grenzen gesetzt. •
Teilen:








{kind=link}