

Ameise, Schmetterling, Chamäleon – nach dem Vorbild der Natur zeigt Festo auf der Hannover Messe neue Projekte, die interessante Ansätze für die Fabrik von morgen aufzeigen.
In diesem Jahr rückt Festo Konzepte im Kontext von Industrie 4.0 in den Vordergrund. Mit Blick auf das Leitthema der diesjährigen Hannover Messe „Integrated Industrie – Join the Network!“ haben sich die Entwickler des Bionic Learning Network von Festo, zusammen mit Hochschulen und Instituten, die Wirkprinzipien von Ameise, Schmetterling und Chamäleon zu Eigen gemacht: BionicAnts und eMotionButterflies sollen veranschaulichen, wie die vernetzte Kommunikation einzelner Systeme zu einem intelligenten Gesamtsystem verschmilzt. Mit dem dritten Projekt FlexShapeGripper nach dem Vorbild der Chamäleonzunge zeigt ein flexibler und anpassungsfähiger Greifmechanismus der Natur mögliche industrielle Einsatzpotenziale auf.
Für die BionicAnts haben die Festo-Ingenieure das kooperative Verhalten von Ameisen zum Vorbild genommen. „Sie kommunizieren miteinander und stimmen ihre Handlungen und Bewegungen aufeinander ab. Jede einzelne Ameise trifft ihre Entscheidungen autonom, ordnet sich dabei aber dem gemeinsamen Ziel unter und trägt so ihren Teil zur Lösung der Aufgabe bei“, erläutert Dr Heinrich Frontzek, Leiter Future Concepts bei Festo. Auf abstrahierte Weise liefere das kooperative Verhalten interessante Ansätze für die Fabrik von morgen. Als Grundlage künftiger Produktionssysteme sieht Festo intelligente Komponenten, die sich flexibel auf verschiedene Produktionsszenarien einstellen und so Aufträge der übergeordneten Steuerungsebene übernehmen.
Komplexe Themen der zukünftigen Produktionswelt wie Funktionsintegration, Ultraleichtbau und die vernetzte und in Echtzeit optimierte Kommunikation einzelner Systeme veranschaulichen bionische Schmetterlinge. Durch Kommunikations- und Sensortechnologie, die ein Indoor-GPS-System darstellt, sind die eMotionButterflies zu kollisionsfreiem und kollektivem Verhalten fähig.
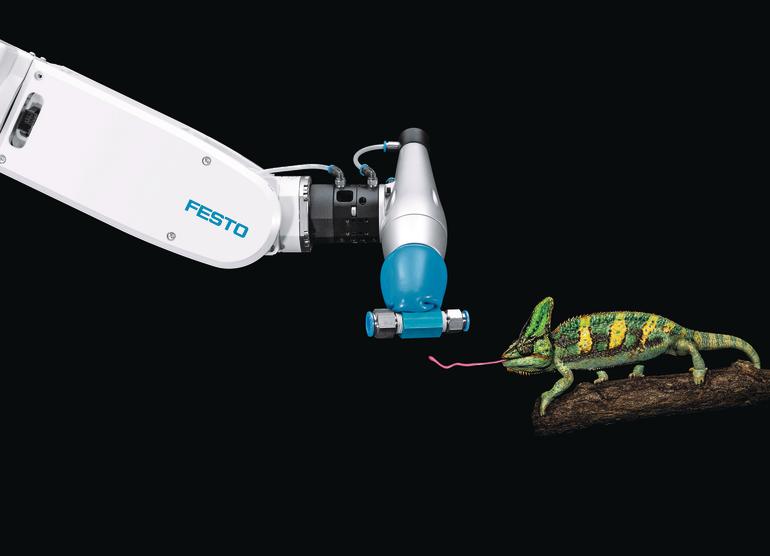
Ein Greifer, dessen Wirkprinzip von der Zunge des Chamäleons abgeleitet ist, verdeutlich das Projekt FlexShapeGripper. Hierbei stülpt sich eine wassergefüllte Silikonkappe flexibel und formschlüssig über das jeweilige Greifgut. Dadurch lassen sich laut Heinrich Frontzek „mehrere Objekte mit unterschiedlichsten Formen in einem Vorgang greifen, sammeln und wieder abgeben – ohne einen manuellen Umbau“. (dk) •
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:







{kind=link}