Die bisher an Armen und Greifern von Robotern eingesetzten ergänzenden Sensoren sind meist auf eine Funktion beschränkt: Sie detektieren entweder Bewegungen durch Annäherung eines Objekts oder Berührungen in Form von Druck. Hingegen vereinen die am KIT (Halle 2, Stand B16) entwickelten kapazitiven taktilen Näherungssensoren (TNS) beide Funktionen: Sie erfassen sowohl Bewegungen als auch Berührungen – bei Bedarf auch beides gleichzeitig.
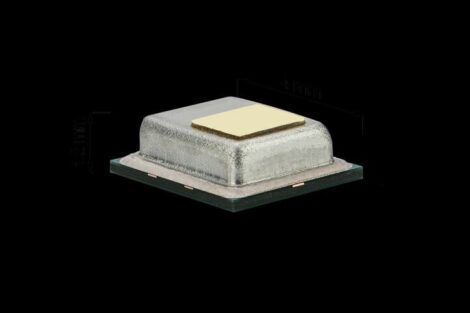
Ein einzelnes Sensormodul besteht aus drei Schichten: Eine flächige Bodenelektrode bildet die unterste Schicht. Die isolierende Zwischenschicht ist aus einem komprimierbaren Material gefertigt, beispielsweise aus Schaumstoff. Die oberste Schicht ist aus mehreren geometrischen, regelmäßig angeordneten Deckelelektroden zusammengesetzt. Je nach Anwendung lassen sich Zahl und Form der Deckelelektroden variieren. Die steuernde Elektronik lässt sich räumlich getrennt von den Sensormodulen verbauen. Eingesetzt werden können die Sensormodule einzeln oder als Sensorsystem aus mehreren vernetzten Modulen.
Hier finden Sie mehr über:







{kind=link}