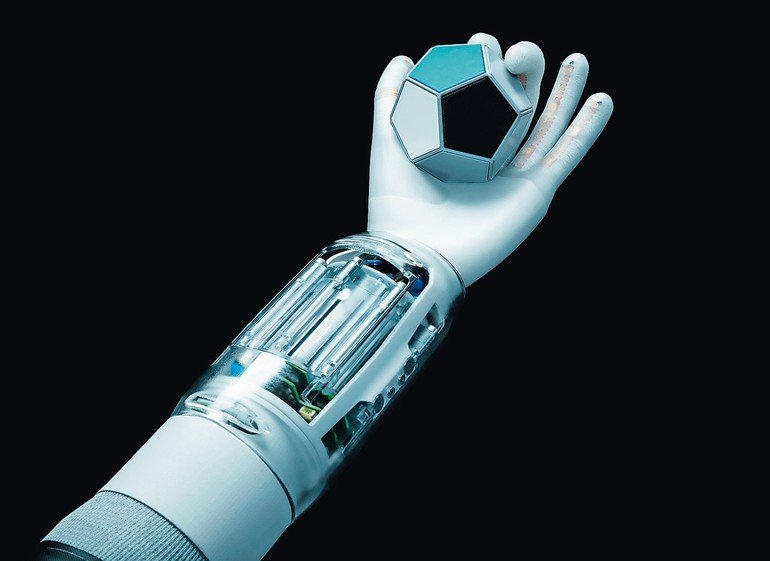
Damit die Roboterhand sicher und direkt mit dem Menschen interagieren kann, wird sie pneumatisch betrieben. Ihre Finger bestehen aus flexiblen Balgstrukturen mit Luftkammern, umschlossen von einem speziellen 3D-Textilmantel. Über das Textil kann genau bestimmt werden, an welchen Stellen die Struktur sich ausdehnt und damit Kraft entfaltet und wo sie an der Ausdehnung gehindert wird.
Bei der Bionic-Soft-Hand kommt die Methode des Reinforcement Learning zum Einsatz, das Lernen durch Bestärken. Das bedeutet: Statt einer konkreten Handlung, die sie nachahmen muss, bekommt die Hand lediglich ein Ziel vorgegeben. Dieses versucht sie durch Ausprobieren (Trial-and-Error) zu erreichen. Anhand des erhaltenen Feedbacks optimiert sie nach und nach ihre Aktionen, bis sie schließlich die gestellte Aufgabe erfolgreich löst. Konkret soll die Hand einen zwölfseitigen Würfel so drehen, dass am Ende eine vorher festgelegte Seite nach oben zeigt. Die dazu nötige Bewegungsstrategie lernt sie in einer virtuellen Umgebung anhand eines digitalen Zwillings, der mithilfe der Daten einer Tiefenkamera und den Algorithmen der künstlichen Intelligenz erstellt wird. Um den Aufwand für die Verschlauchung der Bionic-Soft-Hand möglichst gering zu halten, haben die Entwickler eigens eine kleinbauende, digital geregelte Ventilinsel konstruiert, die direkt unterhalb der Hand angebracht ist.







{kind=link}