Das manuelle Entgraten der Nuten, Gewinde, Schlitze und Bohrungen an großen Generatorwellen, wie sie zum Beispiel in Wasser- oder Braunkohlekraftwerken zum Einsatz kommen, ist fast schon eine Sisyphusarbeit. Die Konturen summieren sich auf über einen Kilometer und müssen zum Teil mehrfach bearbeitet werden. Der Automatisierungsspezialist Indat hat jetzt eine Roboterzelle realisiert, mit der sich solche Großrotoren automatisch entgraten lassen.
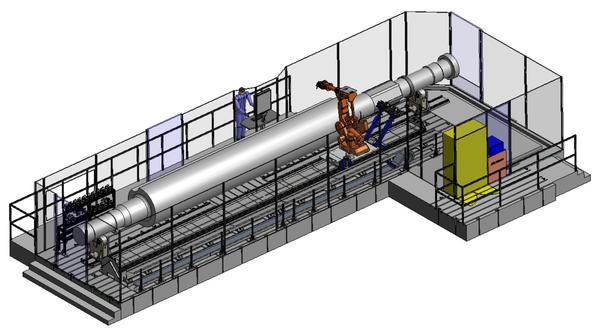
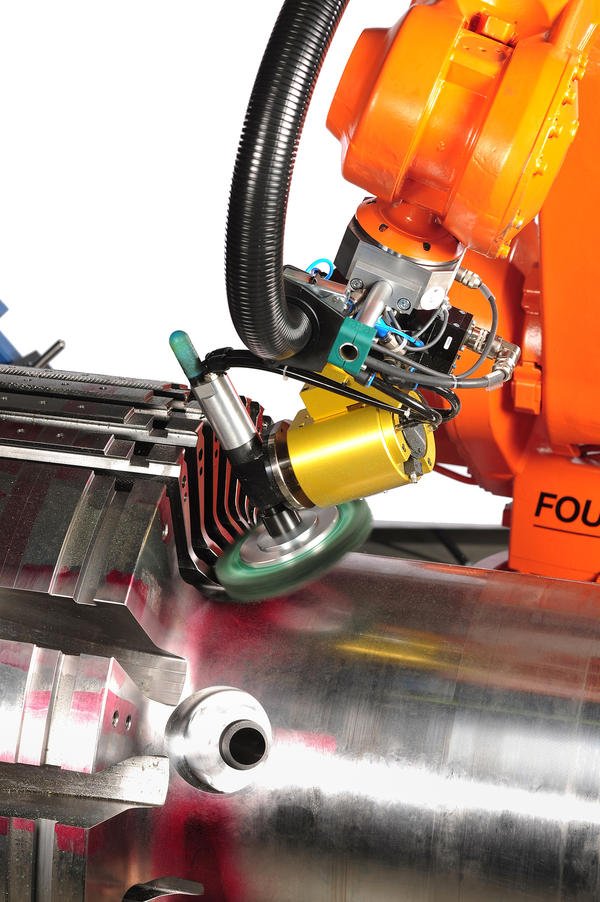
Das Ergebnis kann sich sehen lassen: Im Vergleich mit der herkömmlichen Entgrat-Methode braucht die Roboter-Zelle bis zu 80 % weniger Zeit. Der Clou der Anlage ist ein komplexes Software- und Datenbankkonzept, das die Erstellung des Bearbeitungsprogramms für den Roboter weitgehend per Offlineprogrammierung und 3D-Simulation ermöglicht. Über eine komfortable Oberfläche kann der Bearbeitungsprozess konfiguriert und angepasst werden. Im Mittelpunkt der Anlage fährt ein Sechsachs-Roboter auf einer Schiene an der bis zu 20 m langen und über 60 t schweren Welle entlang und entgratet die Konturen mit verschiedenen, pneumatisch angetriebenen und flexibel gelagerten Werkzeugen. Hierzu zählen Feilen, Bürsten, Fräser, Senker und Schaber. Die Generatorwelle selbst ist auf speziellen Rollenböcken abgelegt und lässt sich im Prozess drehen.
Über 100 unterschiedliche Wellen mit Tausenden von Bohrungen, Nuten und Schlitzen werden auf der Anlage im Jahr bearbeitet. Entscheidend ist deswegen, dass die Anlage mit wenig Aufwand und minimalen Stillstandzeiten gerüstet werden kann. Da wegen der Vielzahl der Konturen das klassisches Teachen des Roboters ausschied, hat der Hersteller ein bislang einmaliges Software- und Datenbankkonzept für das virtuelle Teach-in entwickelt. Das Bearbeitungsprogramm für den Roboter wird an einem 3D-Modell der Anlage und der jeweiligen Generatorwelle offline erstellt und simuliert. Alle Parameter und Einstellungen werden in einer Datenbank gespeichert. An diese sind die Prozesssteuerung und die Prozessvisualisierung angebunden. So kann der Anlagenbediener den Entgrat-Prozess über eine komfortable Oberfläche flexibel konfigurieren und anpassen. Unter anderem kann er beispielsweise die Bearbeitungsreihenfolge wählen. Eine exakte Vermessung der Welle bringt die virtuelle und die reale Welt in Übereinstimmung. Über Lasersensoren ermittelt der Roboter bei einer Messfahrt einige ausgewählte Punkte. Weitere Daten liefert eine digitale Wasserwaage. Mit den Ergebnissen werden die axiale Verschiebung und die Verdrehung der Welle ermittelt.
Teilen:







{kind=link}