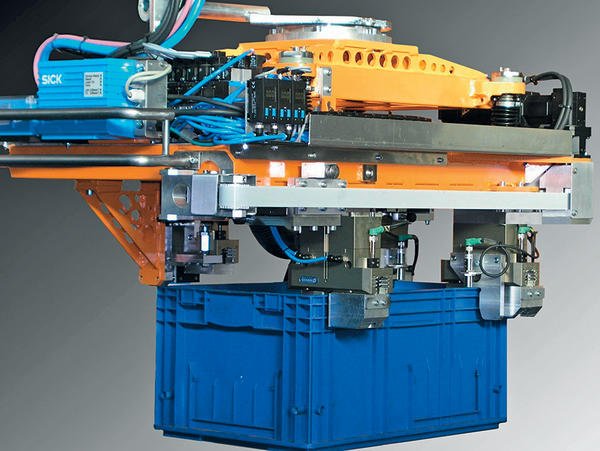
Der Palettierroboter besteht aus einem Industrieroboter mit einem Greifsystem für Kleinladungsträger. Das Greifsystem ist mit einem Lasermess-System für die Lageerkennung und einem sensorüberwachten Toleranzausgleich für Höhendifferenzen ausgestattet. Mit einer Erkennungsfahrt wird die oberste Schicht der beladenen Palette abgetastet. Aus den so gewonnenen Daten wird ein dreidimensionales Oberflächenprofil berechnet und einer Objekterkennung zugeführt. Nach Übergabe der Werte ist der Lageerkennungszyklus abgeschlossen und das Greifsystem kann die Produkte depalettieren. Bevor der Greifer zum nächsten aufzunehmenden Kleinladungsträger fährt, erhält der Roboter alle notwendigen Daten.
Weitere Informationen 511
Unsere Whitepaper-Empfehlung

Benutzeridentifizierung und Zugangskontrolle verbessern Sicherheit und Transparenz im Flottenmanagement
Teilen:








{kind=link}