
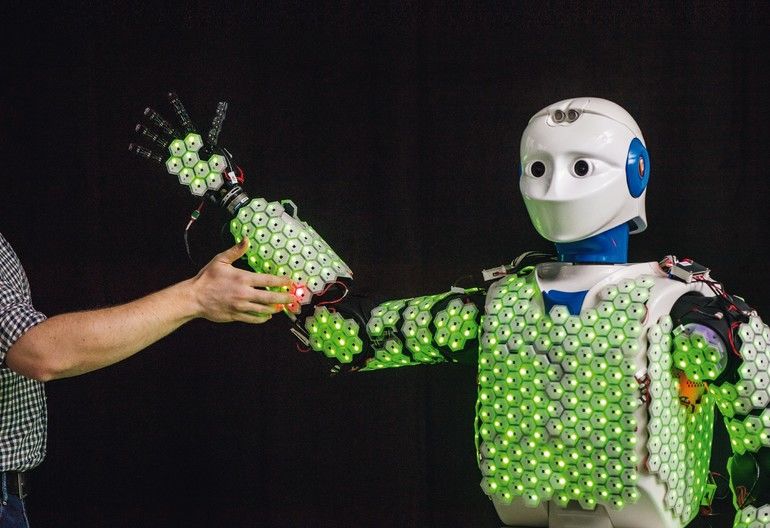
Ein Team der Technischen Universität München (TUM) hat unter der Leitung von Prof. Gordon Cheng eine sensible Haut für Roboter entwickelt. Ein so ausgerüstetes Modell kann seine Umwelt viel detaillierter und feinfühliger wahrnehmen. Die künstliche Haut setzt sich aus sechseckigen Zellen zusammen, die etwa so groß sind wie eine Zwei-Euro-Münze. Jede Zelle ist mit einem Mikroprozessor und Sensoren ausgestattet, die Berührung, Beschleunigung, Annäherung und Temperatur messen. Das größte Hindernis bei der Entwicklung der Roboterhaut war die Rechenkapazität. Deswegen hat Cheng einen sogenannten ereignisbasierten Ansatz gewählt. Dabei geben die Zellen Sensordaten nur weiter, wenn Messwerte sich ändern. Dadurch ließ sich der Rechenaufwand um 90 Prozent drücken. Der Roboter H-1 ist mit insgesamt 1260 Zellen und mehr als 13.000 Sensoren an Oberkörper, Armen, Beinen und Fußsohlen ausgestattet. Dadurch kann er einen Menschen „sicher umarmen“. In der Industrie ist das nicht so wichtig, aber sehr wohl in der Pflege. Hier müssen Roboter für einen engen Kontakt mit dem Menschen ausgelegt sein. Prof. Cheng wird auf dem kommenden Robotics Kongress am 12.02.2020 in Hannover die Keynote zum Thema „Roboterhaut“ halten. Bild: Astrid Eckert, TUM








{kind=link}