
Firmen im Artikel
Die Oberflächenbearbeitung von Bauteilen durch Polieren, Entfernen von Kanten oder Schleifen ist zeitaufwendig und fehleranfällig. Um die komplexen Handgriffe schneller durchführen zu können, entwickelt die TH Köln gemeinsam mit der Joke Technology GmbH eine Software zur Steuerung eines Roboters.
Seine Bewegungen sollen die Handgriffe der Fachkräfte nachahmen. So können Arbeitende vor gesundheitlichen Risiken geschützt werden. Die maschinelle Unterstützung ist zudem ein Weg, um dem zunehmenden Fachkräftemangel zu begegnen.
„Die manuelle Feinbearbeitung ist in vielen Industriezweigen relevant, sowohl bei der Neuanfertigung als auch bei der Aufarbeitung oder Reparatur alter oder beschädigter Bauteile. Die korrekte Ausführung erfordert oft jahrelange Erfahrung. Neben der körperlichen Belastung können auftretende Funken oder das Einatmen von Feinstaub die Gesundheit beeinträchtigen. Aus diesen Gründen gestaltet sich die Nachwuchsgewinnung schwierig“, sagt Projektleiter Prof. Dr. Nicolas Pyschny vom Institut für Allgemeinen Maschinenbau der TH Köln.
Vor diesem Hintergrund ist die roboterbasierte Feinbearbeitung eine Möglichkeit, um Bauteile in kürzerer Zeit bei gleichbleibend hoher Qualität und ohne gesundheitliche Risiken für die Werker und Werkerinnen zu veredeln oder aufzubereiten.
Bedarf an roboterbasierter Oberflächenbearbeitung
In der industriellen Fertigung besteht insbesondere Bedarf an Automatisierungslösungen, die auch Bauteile in geringer Stückzahl schnell und in hoher Qualität bearbeiten können, wie Jürgen Meyer von der Joke Technology GmbH erläutert: „Wir planen schon seit längerem den Einsatz einer Roboterzelle. Bei der Hardwareentwicklung konnten wir bereits Fortschritte erzielen. Die Steuerung des Roboters ist jedoch sehr aufwendig, da es für unsere speziellen Prozesse zu wenig passende Software auf dem Markt gibt.“
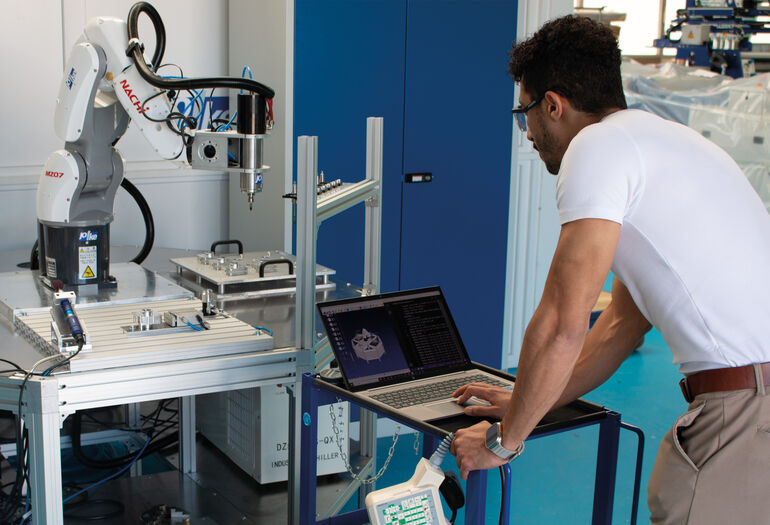
Hier setzt das Forschungsprojekt „Ipro“ an und entwickelt eine grafische Programmierumgebung mit intuitiver Bedienoberfläche, um die Nachbearbeitungsschritte zu vereinfachen.
Dazu werden die Handbewegungen der Arbeitenden beim Polieren per optischer Sensorik aufgenommen. Des Weiteren werden wichtige Daten wie die Kräfte beim Andrücken der Werkzeuge und Umdrehungszahlen über Sensoren erfasst. „Anhand dieser Daten programmieren wir an unserem Versuchsstand die Arbeitsweise des Roboters. In Abstimmung mit den Fachkräften können wir auch festlegen, wann ein Teil der Oberfläche ausreichend behandelt ist und der nächste Bearbeitungsschritt beginnen soll“, so Pyschny.
Vorlagen erstellen
Sind alle Prozessschritte erfasst, werden sie über eine Software-Schnittstelle in einen Programmiercode übersetzt, der die Bewegungen des Roboters automatisch berechnet und ausführt. Die Daten werden in sogenannten Templates, also Vorlagen für den jeweiligen Veredelungsprozess, zusammengefasst.
„Auf der grafischen Oberfläche müssen die Templates dann nur noch in der richtigen Reihenfolge an die Anforderungen des jeweiligen Bauteils angepasst werden. Diese Vorgehensweise wird es den Nutzern und Nutzerinnen wesentlich erleichtern, das Steuerungsprogramm für den Roboter zu erstellen“, erklärt der Projektleiter.
Wissen speichern und verfügbar machen
Ein mögliches Folgeprojekt sieht der Projektleiter im Aufbau einer Wissensdatenbank. Darin könnte das Know-how der Fachkräfte gespeichert werden. Mit diesen Informationen könnte auch eine künstliche Intelligenz trainiert werden, die in der Lage ist, Bearbeitungsprozesse selbstständig zu planen und zu steuern.
Über das Projekt Ipro
Das Projekt „Intelligente Programmierumgebung für die roboterbasierte Oberflächenbearbeitung“ (Ipro) wird unter der Leitung von Prof. Dr. Nicolas Pyschny vom Institut für Allgemeinen Maschinenbau der TH Köln durchgeführt. Der Projektpartner ist die Joke Technology GmbH, die ihre Expertise in der Oberflächenbearbeitung und Automatisierung einbringt. Darüber hinaus ist das Unternehmen für die Weiterentwicklung der Roboterzelle und die Integration der Software verantwortlich.
Das Zentrale Innovationsprogramm Mittelstand (ZIM) des Bundesministeriums für Wirtschaft und Klimaschutz fördert das Vorhaben über die geplante Laufzeit von zweieinhalb Jahren mit rund 400.000 Euro. (bec)








{kind=link}