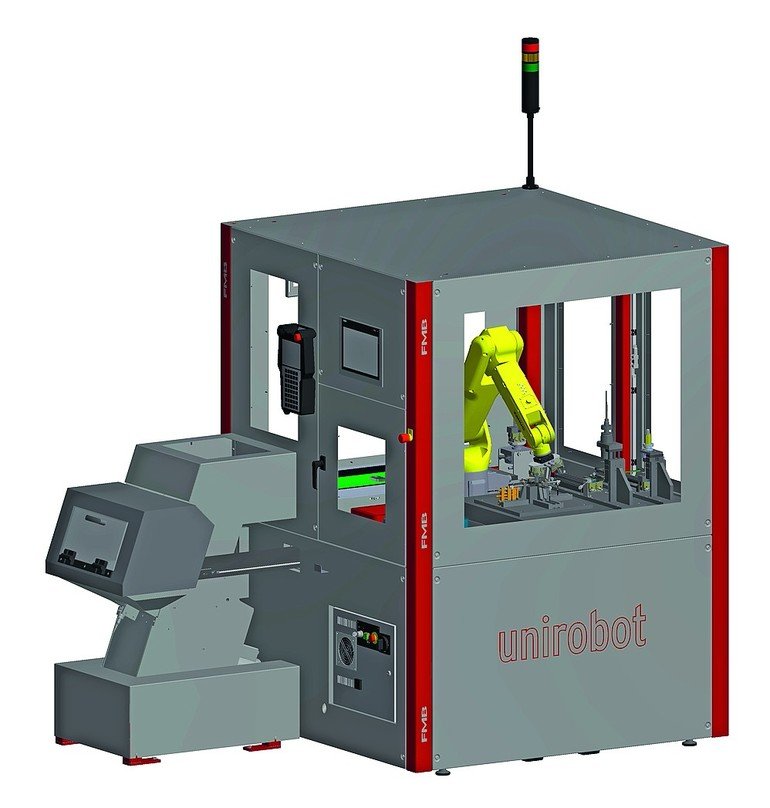
Auf seinem Stand hat der Automatisierungsspezialist aus Faulbach eine kompakte Roboterzelle aufgebaut, um Anwendungsfälle praxisnah zu zeigen. Aus einem Bunker fördert ein Stufenförderer ungeordnet vorliegende, flache Bauteile zunächst auf ein Transportband. Eine Kamera erfasst ihre Lage und Position. Anhand dieser Daten greift der in die Zelle integrierte Roboter jeweils ein Bauteil. Hat die automatische Bilderkennung ergeben, dass ein Bauteil gewendet werden muss, legt der Roboter dieses in eine Wendestation. Bereits in der passenden Lage gegriffene Werkstücke bringt er direkt zur ersten von drei integrierten Messstationen. Dort entnimmt er mit seinem Doppelgreifer zuerst das bereits gemessene Bauteil und legt das nachfolgende ein. Anschließend transportiert er das teilweise gemessene Werkstück zur zweiten und schließlich zur dritten Messstation. Die Messdaten werden ausgewertet und auf dem Display angezeigt. Eine Software beurteilt die Qualität der Bauteile, die der Roboter danach in entsprechende Behälter sortiert.
Da die Roboterzelle modular aufgebaut ist, kann der Hersteller verschiedene Messstationen und Verfahren integrieren und so kundenspezifische Anforderungen erfüllen. Auch die Abmessungen und Eigenschaften der Bauteile können variieren. Somit können Metall- oder Kunststoffteile gleichermaßen gemessen und sortiert werden. Bei Varianten einer Bauteilefamilie lässt sich die Zelle schnell umrüsten. Der Hersteller kann sicherstellen, dass die Bauteile auch in kurzen Taktzeiten zuverlässig und zu hundert Prozent gemessen und beurteilt werden. Da die erfassten Daten über eine wählbare Datenschnittstelle bereitgestellt werden, lässt sich die Zelle in eine unternehmensweite Vernetzung einbinden und entspricht somit den Anforderungen von Industrie 4.0. (ub)









{kind=link}