

Firmen im Artikel
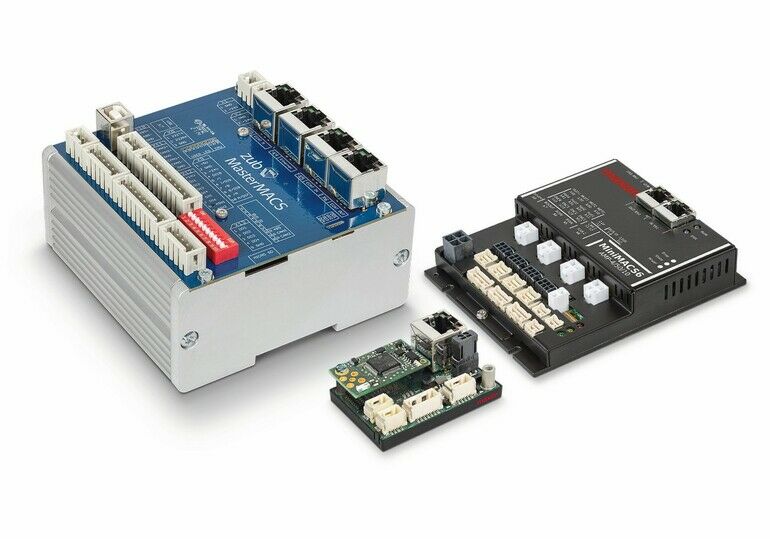
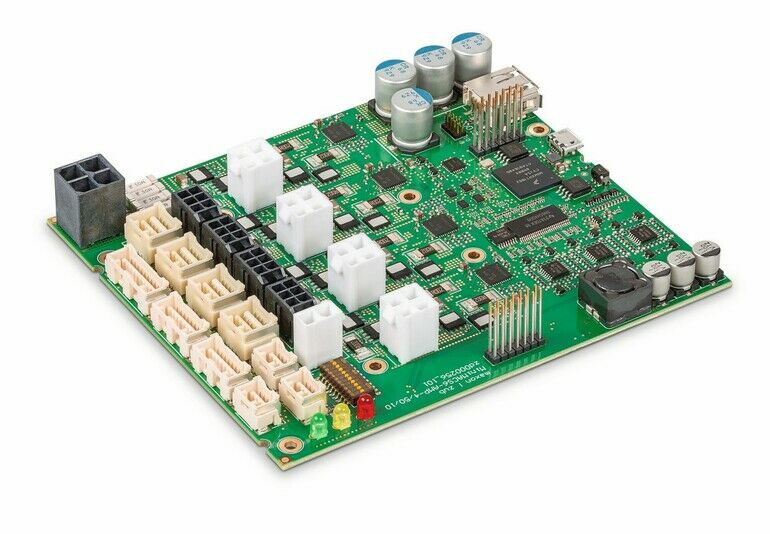
MACS-Steuerungen regeln autark das hochdynamische Positionieren und Synchronisieren von bis zu 32 Achsen. Bevorzugt kommen die Controller dort zum Einsatz, wo SPS-Lösungen entweder zu teuer sind oder schlichtweg den hohen Anforderungen nicht gerecht werden. Mit den Steuergeräten der MACS6-Generation bringt Maxon zwei sehr kompakte Geräte auf den Markt: Die MiniMACS6-AMP-4 bewegt bis zu vier BLDC-Motoren, sechs DC-Motoren oder drei Schrittmotoren und verfügt über integrierte Endstufen und Encoder-Eingänge. Die MicroMACS6 hingegen ist ein reiner Master Controller ohne Endstufen und kommandiert ein bis sechs externe Endstufen über CANopen. Die MicroMACS6 ist eine der kompaktesten Steuergeräte auf dem Markt. Diese Motion Controller spielen eine zentrale Rolle bei der Zusammenführung von Antriebskomponenten zu einem mechatronischen System.
Doch warum sollte innerhalb eines funktionierenden mechatronischen Systems ein elementares Bauteil wie eine Steuerung ausgewechselt werden? Die Beweggründe können vielfältig sein: Lieferengpässe oder gar Abkündigungen von elektronischen Bauelementen erschweren die Produktion und stellen das Management vor große Herausforderungen. Wie kann kurzfristig reagiert und eine agile Lösung für das bestehende System gefunden werden? Die Entwicklung einer eigenen Lösung kostet erfahrungsgemäß Zeit und Geld und ist nicht immer wirtschaftlich sinnvoll. Gleichzeitig müssen bestehende Anlagen «in time» weiterlaufen.
Ein weiteres Szenario ist die Erweiterung eines bestehenden Systems um eine oder mehrere Achsen. Wie lässt sich dies mit geringem Aufwand realisieren, ohne zu sehr in das bestehende System einzugreifen und dieses zu beeinträchtigen? Mit der MiniMACS6 und der MicroMACS6 bietet Maxon eine kompakte, frei programmierbare Steuerung an. Dadurch wird eine einfache Integration und eine schnelle Umsetzung beim Endkunden ermöglicht. Die Steuerung kann auf eine breite Hard- und Softwarebasis zurückgreifen und diese auf spezifische Anforderungen adaptieren. Innerhalb weniger Tagen kann ein Funktionsmuster erstellt werden, das die angeforderte Performance vollumfänglich erfüllt.
Durch eine sorgfältige Abstimmung der Architektur und Konfiguration der Steuerung auf die Anforderungen der Anwendung wird eine sichere Integration in das bestehende System gewährleistet. In einigen Fällen können jedoch zusätzliche Hardware oder leistungsfähigere Steuerungen erforderlich sein.
Dank ihrer flexiblen Programmierbarkeit ermöglichen MACS-Steuerungen eine umfassende Auswahl an Architekturen für verschiedene Anforderungen. Die Steuerungen können sowohl als CiA402-Slave in konventionellen Anwendungen als auch als Master in Teil- oder Gesamtsystemen eingesetzt werden.
Die Schnittstelle zu über- oder untergeordneten Systemen kann individuell definiert werden, was die Integration in bestehende Systeme erleichtert. Dies bietet Ingenieuren und Technikern mehr Möglichkeiten bei der Entwicklung mechatronischer Systeme und ermöglicht somit eine flexible Anpassung an sich verändernde Anforderungen zu jeder Zeit.
Kommunikation mit einer MACS-Steuerung
Die MACS6-Generation bietet verschiedene Kommunikationsprotokolle, die sich zur Integration in unterschiedliche Systeme eignen. Dazu zählen zwei unabhängige CAN-Treiber sowie Schnittstellen für USB, TCP/IP (Transmission Control Protocol/Internet Protocol) und EtherCAT (Slave).
Für die Einbindung in Windows-Systeme wird eine Kommunikations-DLL bereitgestellt, während für Linux-Systeme eine Bibliothek zur Verfügung gestellt wird. Unabhängig davon können die MACS-Steuerungen über den Ethernet-Port auch als TCP-Client oder TCP-Server betrieben werden. Diese ermöglichen die Kommunikation zwischen der MACS-Steuerung und dem übergeordneten System und erleichtern die Integration der Steuerungen.
Für den Einsatz einer MiniMACS6-Steuerung sind Kenntnisse in Programmiersprache C von Vorteil. Um den Einstieg zu erleichtern, bietet Maxon ein kostenloses SDK (Software Development Kit) an. Diese Softwareentwicklungspaket enthält nützliche Funktionen sowie zahlreiche spezifische Programmbeispiele.
Mit der Entwicklungsumgebung Aposside können Steuerungsprozesse in Echtzeit analysiert und aufgezeichnet werden. Mit der Applikationsbibliothek kann auf vorgefertigte Standardlösungen für verschiedene Maschinentypen und Anwendungen zurückgegriffen werden.
Die richtige Schnittstelle
Welche Schnittstellen werden benötigt? Mit der MiniMACS6-AMP-4/50/10 bietet Maxon beispielsweise die Standardschnittstellen CAN und CANopen als Master und Slave an. Dank eines integrierten SoC (System on-a-Chip) werden auch Ethernet und das EtherCAT-Interface (ProfiNet nach Absprache) unterstützt. Auf Wunsch kann auch eine USB-Anbindung bereitgestellt werden. Die MicroMACS6 verfügt erstmals über eine BLE (Bluetooth Low Energy) Service- und Support-Aufsteckoption. Damit ist erstmals eine kabellose Schnittstelle zu allen Knoten des CANopen Bus für den Service und Support über eine spezifische Smart-Device-Applikation möglich.
Als Spezialist für Mehrachspositionierung und -synchronisierung bietet Maxon auch kundenspezifische (OEM) Lösungen an. Ein weiterer Grund für eine so umfangreiche Auswahl an Schnittstellen ist, dass Schnittstellen in einer spezifischen Architektur gleichzeitig benötigt werden. Zum Beispiel werden Serviceschnittstellen für Debuggen oder Sicherstellung von Oszilloskop-Aufzeichnungen oder Überwachung von Bewegungsabläufen benötigt, ohne dabei die Kommunikation eines übergelagerten Systems zu unterbrechen.









{kind=link}