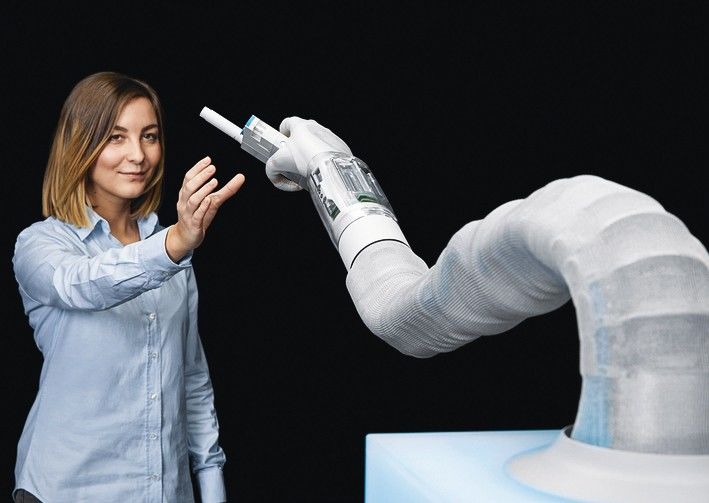
Kombiniert mit dem Bionicsoftarm, einem pneumatischen Leichtbauroboter, eignet sich die pneumatische Roboterhand Bionicsofthand von Festo für die Mensch-Roboter-Kollaboration. Ihre Finger bestehen aus flexiblen Balgstrukturen mit Luftkammern. Umschlossen sind die Bälge in den Fingern von einem speziellen 3D-Textilmantel, der sowohl aus elastischen als auch hochfesten Fäden gestrickt ist. Damit kann über das Textil genau bestimmt werden, an welchen Stellen die Struktur sich ausdehnt und damit Kraft entfaltet und wo sie an der Ausdehnung gehindert wird. Dadurch ist sie leicht, nachgiebig, anpassungsfähig und sensibel, aber dennoch in der Lage, starke Kräfte auszuüben. Um den Aufwand für die Verschlauchung gering zu halten, haben die Entwickler eine kleinbauende, digital geregelte Ventilinsel konstruiert, die direkt unterhalb der Hand angebracht ist. Dadurch müssen die Schläuche zur Ansteuerung der Finger nicht durch den kompletten Roboterarm gezogen werden.
Hier finden Sie mehr über:







{kind=link}