

In Hinblick auf individuelle Produkte und kleine Losgrößen sei vor allem „die Wandelbarkeit der Systeme“ entscheidend, meint Dr. Christian Henke, Abteilungsleiter Scientific Automation am Fraunhofer IEM, Paderborn: „Oftmals fehlen flexible Lösungen, die aufwandsarm auch Aufträge mit kleiner Stückzahl erledigen können. Die am Fraunhofer-Institut für Entwurfstechnik Mechatronik (IEM) entwickelten Cobotlösungen setzen genau hier an und können damit insbesondere für mittelständische Unternehmen interessant sein.
Man arbeite daran, dass Cobots ohne Programmieraufwand an neue Arbeitsaufgaben angepasst werden können. Sensorgeführte Systeme sollen zudem die Anpassungsfähigkeit erhöhen, indem Bauteilabweichungen direkt erfasst werden und der Roboter seine Abläufe autonom anpassen kann.
Oftmals sei eine freie Bewegung in einem großen Arbeitsraum erforderlich, so Henke. Dann seien zusätzliche Achsen notwendig, die steuerungstechnisch vollständig integriert werden müssten. Dabei würden intelligente Sensoren und Algorithmen eine reibungslose Kommunikation zwischen Roboter und Achsen ermöglichen. Synchronisierte Bewegungen könnten für einen präzisen Einsatz des Werkzeugs sorgen. Und zudem würden Zusatzachsen in Kombination mit dem Cobot eine einfache Anpassung des Systems an sich ändernde Anwendungsszenarien ermöglichen – ohne aufwendige Umbau- und Rüstarbeiten.
Jörg Reger, Leiter des Geschäftsbereichs Robotik und Fertigungsautomation bei ABB Deutschland, sagt: „Wir sehen weiterhin eine steigende Nachfrage zu integrierten Automatisierungslösungen, die Flexibilität, Produktivität, Qualität und Einfachheit effizient verbinden. Dies beginnt bereits bei der Planung einzelner Produktionsanlagen oder ganzer Fertigungslinien. Mit flexiblen Lösungen können Unternehmen dem Trend der individualisierten Massenproduktion folgen und Prozesse in Losgröße eins realisieren. Der Einsatz von Robotern ist dabei unumgänglich.“ Dabei sei es besonders effektiv, „Robotik und Maschinensteuerung zu einer einheitlichen Architektur zu verschmelzen, um Präzision zu realisieren“, erläutert Reger.
Stellenwert künstlicher Intelligenz in der Robotik
Zunehmend kommen in der Robotik KI-Anwendungen zum Tragen. Volker Hartmann, Leiter Sales & Engineering Intralogistik und Robotik bei Bosch Rexroth, sagt: „Der produktive Einsatz von künstlicher Intelligenz ist ein wichtiges Thema in der Fabrikautomation. Einer der ersten Anwendungsfälle wird die Kombination von Robotik mit industrieller Bildverarbeitung sein. Hierfür wird Software zunächst über Machine Learning trainiert. In der variantenreichen Fertigung wollen wir noch einen Schritt weitergehen: Künstliche Intelligenz im Produktionsnetzwerk wird zukünftig auch Einzelstücke ohne Teaching erkennen und beurteilen können.“
Laut Michael Otto, Chief Regional Officer Germany bei Kuka, helfe maschinelles Lernen als Teilbereich der KI dabei, „Robotersysteme für die flexible Fertigung fit zu machen“. Es gehe darum, Daten zu interpretieren, Korrelationen zu finden und Informationen abzuleiten. Jüngste Erfolge seien im Bereich des maschinellen Lernens, insbesondere im Bereich Computer-Vision, verzeichnet worden, was Robotern im Sinne größerer Autonomie und Flexibilität zugute käme, meint Otto: zum Beispiel zur Objekterkennung, semantischer Szenenanalyse und Greifpunkterkennung als Grundvoraussetzung für intelligentes Verhalten von Robotern. Auch die optimale Parametrisierung von Roboterbewegungen, beispielsweise beim Schweißen oder bei Montagevorgängen, sei eine bereits heute realisierte Anwendungsmöglichkeit.
Enormes Potenzial in KI-Anwendungen und speziell im maschinellen Lernen sieht auch Reger bei ABB: KI-Anwendungen würden es ermöglichen, gesammelte Daten in nützliche Informationen umzuwandeln, um Roboter langfristig „autonom, selbstlernend oder selbstoptimierend zu gestalten“. Darüber hinaus würden Anwender von zuverlässigen, flexiblen sowie einfach zu bedienenden Robotern profitieren.
Robotik und Greifsysteme profitieren stark von KI
Dass der Trend einer zunehmenden Individualisierung der Produktion auch die Konstruktion von Roboter-Tools beeinflusst, macht Dr. Jens Kotlarski, Co-Founder und CEO von Yuanda Robotics, deutlich: „Immer mehr Hersteller haben es mit kleinen Chargen bis hin zu Losgröße eins zu tun. Wir wollen ihnen mit unseren Greiferlösungen ermöglichen, kleine Losgrößen effizient zu handhaben – beispielsweise mittels Hafttechnologie unseres Gecko-Greifers.“
Henke vom Fraunhofer IEM erklärt, dass vor allem im Bereich der Bildverarbeitung beispielsweise Machine Learning zur Mustererkennung genutzt werde, um sicheres Greifen auch unbekannter Objekte zu ermöglichen: „Der Roboter wird befähigt, Objekte zu erkennen, zu lokalisieren und schließlich zu greifen. Weitere KI-Trends liegen im Bereich der Sprach- und Gestenerkennung zur Optimierung der Interaktion zwischen Mensch und Roboter. Das einfache Anleiten von Robotern durch den Menschen ist ein Wachstumstreiber für den Robotermarkt. Dies setzt jedoch eine hohe Intelligenz der Roboter voraus.“
Dr. Maik Fiedler, Leiter des Geschäftsfelds Vakuum-Automation bei Schmalz, sagt: „In unseren Handling-Sets benutzen wir bereits KI, was wir auch weiter ausbauen werden. Ich bin sicher, dass unsere Greifer künftig selbstständig lernen und entscheiden werden.“ Schon heute sei es möglich, dass ein Kamerasystem mithilfe eines 3D-Sensors das zu greifende Objekt erkennt, die Software den idealen Greifpunkt berechnet und den Roboterarm steuert, um das Bauteil zu greifen. Man habe bereits eine Lösung so gestaltet, dass sie die Ziele kollisionsfrei anfahren und Objekte sicher entgegennehmen kann. Durch KI soll der Greifer auch erkennen, wie er eine Aufgabe anders lösen muss, falls der erste Greifversuch nicht funktioniert. Für dieses Anlernen werde es dann verschiedene Wege geben – zum Beispiel basierend auf CAD-Daten oder Trial-and-Error. Es gehe darum, den schnellsten, effizientesten Weg zu finden, um die Algorithmen zu trainieren. Zusammenfassend meint Fiedler: „Für uns steht beim Thema KI stets im Vordergrund, wie wir den Griff in die Kiste robuster und sicherer gestalten können. Es geht beispielsweise darum, Objekte in ihren Farben und Formen unterscheiden zu können oder dem Bediener das Programmieren und die Inbetriebnahme zu erleichtern. Es geht uns nicht mehr nur um den Greifer, sondern vielmehr um die Gesamtlösung. Wir legen den Fokus auf das System, das aus Greifer, Kamera und Software besteht.“
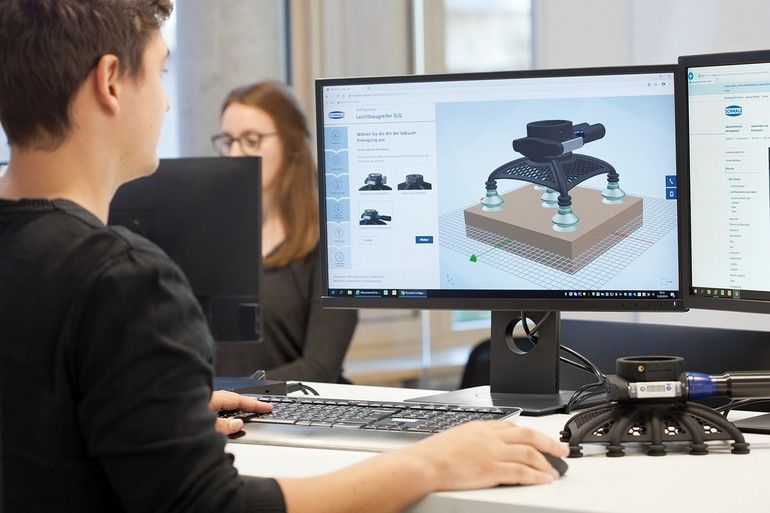
Damit sollen auch flexible und effiziente Systeme an Leichtbau- und Kollaborationsrobotern vorangetrieben werden. Dazu gehören Bin-Picking-Lösungen ebenso wie Leichtbaugreifsysteme. Ein Beispiel dafür ist der SLG von Schmalz. Der Greifer wird vom Anwender online individuell konfiguriert und eignet sich zur automatisierten Handhabung unterschiedlicher Werkstücke. Das additive Fertigungsverfahren soll das System flexibel und kurzfristig verfügbar machen.
Einen weiteren Schwerpunkt setzt Schmalz im Sinne intelligenter Komponenten, sogenannter Smart Field Devices. Sie sollen wichtige Informationen liefern, um Prozesse nachhaltig zu verbessern. IO-Link habe sich dabei als standardisierte Schnittstelle für die Kommunikation zwischen der übergeordneten Steuerung sowie der Sensor- und Aktorebene etabliert. Um Anwendern den Überblick über ihre IO-Link-Komponenten zu erleichtern, ist die sogenannte Connect-Suite entwickelt worden.
Ohne in die Steuerung einzugreifen, soll die Software eine Analyse der Daten sowie die Parametrierung der einzelnen Geräte ermöglichen – und zwar über den gesamten Lebenszyklus hinweg. Das funktioniere sowohl bei den unternehmenseigenen Smart Field Devices als auch bei Komponenten anderer Hersteller.
Als Spezialist für Greifsysteme untersucht auch Schunk intensiv, wie Greifvorgänge automatisiert werden können, um die bislang übliche Programmierung des Roboters mittelfristig durch einen lernenden, autonomen Komponentenverbund zu ersetzen, sagt Harald Dickertmann, Executive Vice President Sales Gripping Systems bei Schunk: „Statt Positionen, Geschwindigkeiten und Greifkräfte einzeln zu programmieren, werden Greifsysteme künftig ihre Zielobjekte über Kameras erfassen und die Greifplanung selbstständig übernehmen. Ansätze hierfür sind modellbasierte Konzepte, bei denen im Vorfeld Objekte und Greifstrategien definiert werden, modellfreie Konzepte, bei denen das Greifsystem selbst die bestmögliche Greifstrategie plant, sowie datenbasierte Konzepte, bei denen das Greifsystem gute und schlechte Greifvorgänge differenziert und auf Basis der erfassten Erfahrungswerte die jeweils beste Greifstrategie ermittelt.“
Besondere Attraktivität gewinne die Technologie des autonomen Greifens durch ihre Möglichkeit, „die gewonnene Lernerfahrung mit anderen, vergleichbar eingesetzten Greifsystemen im Produktionsnetzwerk oder standortübergreifend zu teilen, beispielsweise über Cloudlösungen“, erläutert Dickertmann. Auf Grundlage solcher Datenbestände und Algorithmen sollen Greifsysteme künftig in der Lage sein, Gesetzmäßigkeiten zu erkennen und entsprechende Reaktionen abzuleiten.
Hinter den Greiferentwicklungen stehe bei Schunk auch die Feststellung, dass vor allem die Arbeitsplatzergonomie zu einem wichtigen Treiber der Mensch-Roboter-Kollaboration wird, meint Dickertmann: „Unternehmen suchen nach Möglichkeiten, wie sie die Arbeitskraft und das Know-how ihrer Mitarbeiter in Zeiten des Fachkräftemangels und des demographischen Wandels erhalten und sichern können, indem sie die körperliche Belastung wirkungsvoll senken.“
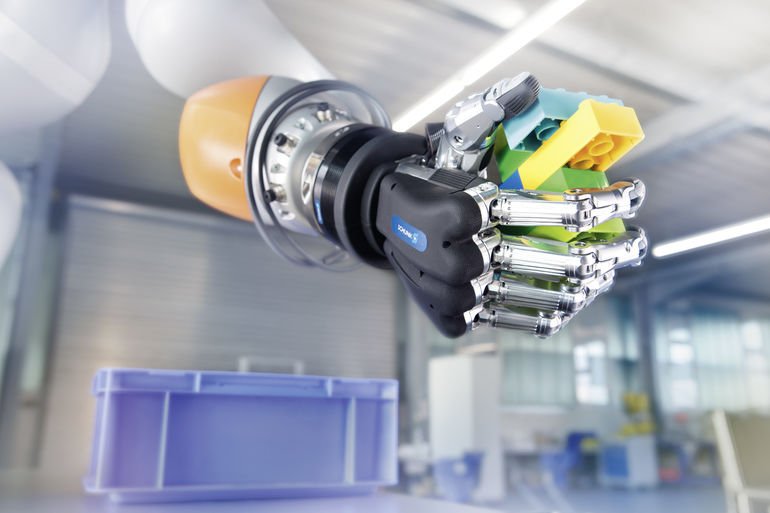
Mit dem Co-act EGL-C bietet Schunk beispielsweise einen Greifer für den kollaborierenden Betrieb mit 450 N Greifkraft. Eine integrierte Kraft- und Wegmessung sowie eine Sicherheitsintelligenz ermöglichen, dass im kollaborativen Betrieb formschlüssig gegriffene Teile bis 8 kg gehandhabt werden können – und zwar mit in ISO/TS 15066 definierten biomechanischen Grenzwerten. „Damit stoßen wir im Bereich kollaborativer Systeme in eine vollkommen neue Dimension vor“, sagt Dickertmann. Haupteinsatzfelder seien die unzähligen Montageanwendungen, bei denen Bauteile bislang manuell zugeführt, gehalten und mit größtem motorischen Feingefühl montiert werden. Gerade im Lastbereich unter 10 kg werde in den Montagelinien bislang wenig technische Unterstützung angeboten, obwohl die körperliche Belastung auf Dauer hoch sei. Würden Cobots diese Last tragen, ohne die Flexibilität und das Prozesstempo einzuschränken, könnten sich die Werker weitaus besser auf die qualitätsentscheidenden Kernaufgaben konzentrieren, meint Dickertmann.
Schunk-CEO, Henrik A. Schunk, betont: „Die industrielle Transformation erfordert einen frischen, kreativen Blick auf die Robotik.“ Flexibler, einfacher, ja geradezu spielerisch müssten sich die Szenarien mit Leichtbaurobotern und Cobots realisieren lassen, so der Unternehmer. Genau hier soll ein Plug-and-Work-Portfolio künftig ansetzen. Im Kern gehe es um eine radikale Simplifizierung – von der Komponentenauswahl über die Konfiguration und Montage bis zum laufenden Betrieb. Dass sich in diesem Zusammenhang auch neue Greiftechnologien etablieren werden, steht für Henrik A. Schunk außer Frage: „Je weiter die Robotik in neue Anwendungsfelder vordringt, desto vielfältiger wird auch das Spektrum an Greifsystemen sein.“
www.boschrexroth.com
www.kuka.com
www.iem.fraunhofer.de
www.new.abb.com
www.schmalz.com
www.schunk.com
www.yuanda-robotics.de
Citius, altius, fortius
Auf die Robotik übertragen kann das olympische Motto „Höher, schneller, weiter“ recht gut „Flexibler, einfacher, intelligenter“ lauten.
Angespornt, Roboter fit für Fertigungslayouts einer zunehmend individualisierten Massenproduktion zu machen, bereiten Entwickler diese gerade als integrativen Bestandteil größerer Maschinen vor – und zwar als möglichst wirtschaftliche, leicht nutzbare und gern KI-gestützt Systeme.







{kind=link}