
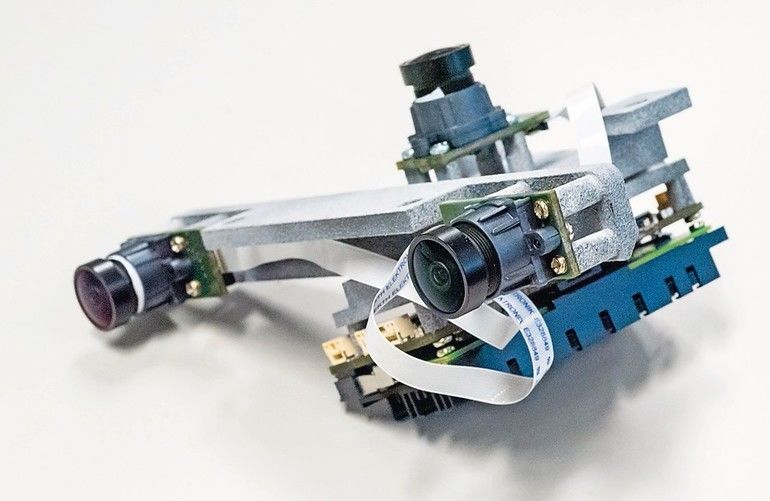
Die eingereichte Lösung ist ein Lokalisierungssystem, das auf Bildverarbeitung basiert und mobile Roboter dabei unterstützen soll, sich autonom in anspruchsvollen und hochdynamischen Innen- und Außenbereichen zu bewegen – und zwar ohne zusätzliche Infrastruktur wie Marker oder Baken. Aus den Kamerabildern werden umfangreiche Informationen über die Umgebung des Roboters gewonnen, die ihn in die Lage versetzen, Wege zu lokalisieren und zu planen. In der umfassenden Lokalisierungseinheit sind Hard- und Software bereits komplett integriert. Die Lösung basiert auf moderner Vision-Technik, die von KI-Methoden unterstützt wird. Das System soll sich mit unterschiedlichen mobilen Plattformen kombinieren lassen.
Die kamerabasierten Daten haben einen hohen Informationsgehalt, der sich durch geeignete Auswertung auf wenige, aber sichere Daten reduziert lässt. Nach Angaben der Spezialisten aus Zürich kann der Anwender auf teure Sensoren für die Entfernungsmessung verzichten. Zu den typischen Einsatzbereichen für die neue Technik zählen große, unstrukturierte Umgebungen wie Flughäfen, Bahnhöfe oder Supermärkte. Denkbar sind aber auch hochdynamische Bereiche wie Lager- und Fertigungshallen. Zu den anvisierten Hauptmärkten gehören derzeit die Bodenreinigung und der automatisierte Materialfluss. Verhandlungen mit Gabelstaplerherstellern laufen. Das Produkt befindet sich im fortgeschrittenen Testzustand. In einem Pilotprojekt wird die Lösung derzeit zusammen mit einer professionellen Reinigungsmaschine erprobt. (ub)







{kind=link}