
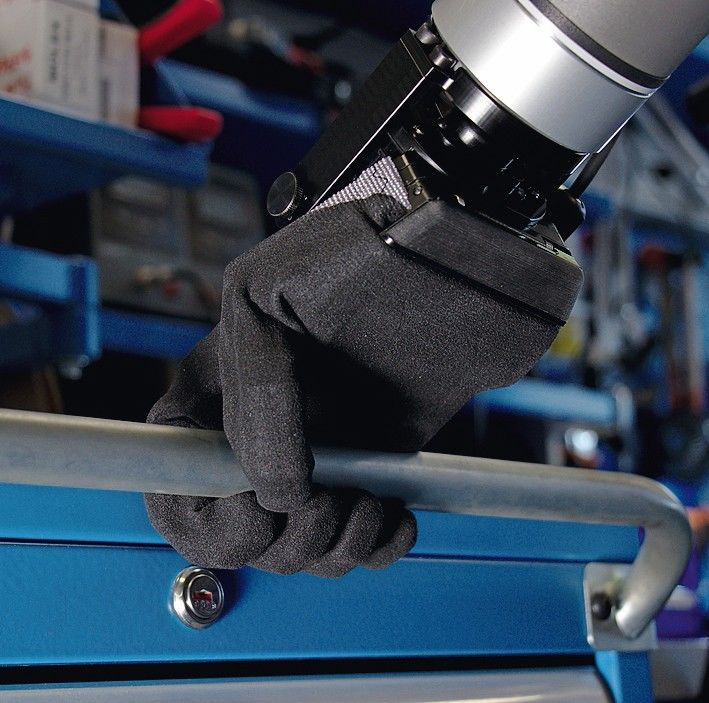
Die Entwicklung ist nach eigenen Angaben für die Zusammenarbeit mit dem Menschen geeignet. Dafür sorgen ausgewählte Materialien und die flexible Konstruktion. Eine zufällige Kollision sei in jeder Situation sicher und könne zu keinen Verletzungen beim Werker führen. Die Hand besitzt eine anthropomorphe Form und besteht aus vier Fingern und einem Daumen mit insgesamt 19 Freiheitsgraden. Die Lösung ist sehnengesteuert und besitzt nur einen Motor zum gemeinsamen Öffnen und Schließen der fünf Finger. Die Italiener haben ihr Produkt so konzipiert, dass Werkzeuge mit der ganzen Hand stark genug gegriffen werden können, so dass sie sich unter der Kontrolle von Arm und Handgelenk nutzen lassen. Der komplette Konstruktionsprozess der Roboterhand wurde in Übereinstimmung mit den einschlägigen Normen und Zertifizierungsstandards durchgeführt. Das Produkt erhielt die TÜV-Zertifizierung und darf bei der Mensch-Roboter-Kollaboration zum Einsatz kommen. (us)







{kind=link}