


Der Roboter-Griff in die Kiste ist technisch machbar, angeblich für fast alle Teile. Software aus den Mars-Expeditionen macht’s möglich. Das Anbieter-Trio aus K.A.T., Astrium und Kuka braucht nur noch den ersten Referenzkunden.
Von unserem Redaktionsmitglied Thomas Preuß
Leben auf dem Mars zu finden, war erklärtes Ziel der Viking-Expeditionen der Nasa Mitte der 70er bis Anfang der 80er Jahre. Bodenproben wurden mit Hilfe eines Greifers entnommen und im Labor der Sonde untersucht, doch auf Beweise für Leben müssen wir bis heute warten.
Nicht mehr lange warten müssen wir wohl auf eine Anwendung, die praktisch als Abfallprodukt des Projekts entstanden ist: den roboterisierten Griff in die Kiste. Realisiert wurde er nun von den Bremer Unternehmen K.A.T. GmbH und Astrium GmbH Raumfahrt Infrastruktur – der Raumfahrtabteilung der ehemaligen Dasa – sowie der Augsburger Kuka Roboter GmbH.
„Astrium hat die Viking-Sonden damals mit einem Roboterarm und der entsprechenden Software ausgestattet“, sagt Matthias Dargel-Rabin, Projektleiter bei K.A.T. Jetzt will das Bremer Space-Unternehmen seine Erfahrungen in Lösungen für die Industrie ummünzen. „Da den Raumfahrtexperten in dieser Branche aber das Know-how fehlt, sind sie auf uns zu gekommen“, schildert Dargel-Rabin die Kontaktaufnahme.
K.A.T. ist eine Ingenieurgesellschaft für industrielle Kommunikations- und Automatisierungstechnik, die sich vor allem mit CNC-Steuerungen und SPS-Programmierung einen Namen gemacht hat. Als Dritten im Bunde hat Rabin mit seinen Leuten den Roboterhersteller Kuka ins Boot geholt, weil die Anwendungen ohne einen Roboter nicht umzusetzen waren.
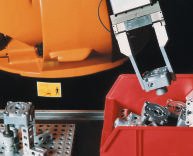
Das Trio glaubt nun, ein großes Problem von Serienfertigern gelöst zu haben: „Alle, die mit Gitterboxen arbeiten, haben Bauchschmerzen“, unterstellt Matthias Dargel-Rabin. „Und zwar dann, wenn es um das Be- und Entladen der Boxen geht.“ Denn in vielen Branchen werden zahlreiche Teile vom Zulieferer zum Kunden ungeordnet in Gitterboxen transportiert. „Vor allem aus Platzgründen“, wie der K.A.T.-Mann weiß. „Zudem ist das Sortieren im Vorfeld zu teuer, und der Preis für die zusätzliche Verpackung kommt auch noch hinzu.“ Für die Weiterverarbeitung müssen sich die Teile aber wieder in einem geordneten Zustand befinden, etwa wenn sie einer Maschine zugeführt werden sollen. Die erforderlichen Sortierschritte erfolgen derzeit in aller Regel von Hand.
Genau auf diese manuellen Tätigkeiten hat es das Dreier-Konsortium abgesehen. „Wir wollen einen völlig neuen Markt erobern“, und Dargel-Rabin steht bei diesem Spruch die Vorfreude im Gesicht geschrieben, „vor allem wollen wir manuelle Billig-Arbeitsplätze ersetzen.“
Das Robotersystem, das K.A.T. mit den assoziierten Firmen nun anbietet, arbeitet mit einem zweistufigen Verfahren. Der Roboter schaut in die Box, und die Software erstellt über das Multi-Vision-Stereo-Prinzip (MVS) Tiefendaten des betrachteten Arbeitsbereichs. Anschließend ermittelt sie über eine Merkmalswichtung das am besten liegende Teil und die optimale Greifposition für den Roboter. Die Methode arbeitet mit vier Kameras, die eine Sequenz von Videobildern aufnehmen, woraus die Tiefendaten an den Objektkanten berechnet werden.
Die Vorteile dieser Vorgehensweise:
– Die Applikation lässt sich in weiten Bereichen an Greifobjekte und Umgebungsbedingungen anpassen.
– Kameras und PC sind Industrie-Standard.
– Die Bildverarbeitung findet während des Ablegeprozesses statt, die Taktzeiten sollen 8 s betragen.
Und das Wichtigste: „Die Applikation ist technisch fertig“, sagt der Projektleiter. „Und mit vielen potenziellen Kunden spielen wir schon Anwendungen ein. Nur ein Referenzkunde fehlt uns noch.“
Sieht so aus, als wolle niemand der Erste auf der Tanzfläche sein. Dabei können sich die Ergebnisse sehen lassen. Beispielsweise werden in der Testphase derzeit für diverse Zulieferer der Automobilindustrie Achszapfen oder Buchsen mit pneumatischen Greifern vereinzelt und definiert abgelegt. Für einen potenziellen Kunden aus der Sicherheitstechnik saugt der Roboter Filtertöpfe an und setzt sie in der Montagevorrichtung ab. Für einen weiteren Kunden platziert der Greifer Gehäusedeckel von elektronischen Bauteilen auf Werkstückträgern. Selbst Zahnbürsten und Küchenmesser lassen sich vereinzeln und an eine Bearbeitungsmaschine oder Transportvorrichtung weiterreichen.
„Prinzipiell können wir alle Anwendungen erfüllen“, versichert K.A.T-Mitarbeiter Dargel-Rabin. Er geht davon aus, dass dafür zwischen 20 und 30 Parametersätze genügen. Mit der Technik wähnt er sich dem Wettbewerb, wie der Fanuc Robotics Deutschland GmbH in Neuhausen oder dem Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA) in Stuttgart, weit voraus. Und er glaubt nicht, dass andere Anbieter in Kürze nachziehen könnten. „Die Software ist bei Astrium schätzungsweise in einigen Dutzend Mannjahren entwickelt worden, die Investition wurde durch die Mars-Expeditionen finanziert. Das kann keiner so schnell aufholen.“
Und der Preis? Allein für die angepasste Software muss ein Kunde voraussichtlich genauso viel hinblättern wie für den Roboter. Dazu kommen die Beträge für die Sicherheitseinrichtung, die Programmierung und die Bus-Anbindung. Dennoch soll sich die Investition für Anwender innerhalb von anderthalb bis zwei Jahren rechnen. Auf die ersten Gesteinsproben vom Mars muss man dann wohl immer noch warten.
Teilen:








{kind=link}