
Eine personensichere Robotersteuerung eröffnet neue sicherheitstechnische Möglichkeiten. Erstmals können Mensch und Roboter ohne trennende Schutzeinrichtungen sicher kooperieren.
Franz Som ist Mitarbeiter bei der Reis GmbH in Obernburg
Warum eigentlich eine personensichere Robotersteuerung? Erstens: Weil Industrieroboter programmiert und eingerichtet werden müssen, was in der Regel nur mit aktiven Antrieben erfolgen kann. Zweitens: Bei einigen Produktionsprozessen ist es unumgänglich, den Prozess aus nächster Nähe zu beobachten, um eventuell korrigierend eingreifen zu können. Und schließlich drittens: Beim Bearbeiten großer, ausladender Bauteile ist eine trennende Schutzeinrichtung oft nicht zu installieren.
In den genannten Fällen können sich Personen in unmittelbarer Nähe des Roboters aufhalten und sind somit potenziell gefährdet. Um dieses Risiko auf ein Mindestmaß zu reduzieren, hat sich der Roboterhersteller Reis GmbH in Obernburg dazu entschlossen, eine personensichere Robotersteuerung zu entwickeln. Das softwarebasierte Konzept ist weltweit einzigartig und bietet eine Vielzahl von Sicherheitsfunktionen.
Das Funktionsprinzip ist einfach: In der Robotersteuerung ist neben dem eigentlichen Steuerungsrechner ein zusätzliches Rechnersystem eingebaut, der so genannte Safety Controller. Dieses System ist in Hard- und Software zweikanalig aufgebaut und bietet Personensicherheit nach DIN EN 954–1, Steuerungskategorie 3. Seine Aufgabe ist es, die korrekte Funktion von Roboter und Steuerung ständig zu überwachen und die Anlage bei Abweichungen von den Nominalvorgaben sicher abzuschalten.
Die Achsstellungen des Roboters werden in den Servo-Reglern zweikanalig erfasst und dem Safety Controller über ein Feldbussystem zweikanalig zur Verfügung gestellt. Aus den Achsstellungen lassen sich Position und Geschwindigkeit des Werkzeugflansches berechnen. Darüber hinaus sind sichere digitale Ein- und Ausgänge für den Anschluss von Schutzgitter, Lichtschranken oder Not-Aus vorhanden.
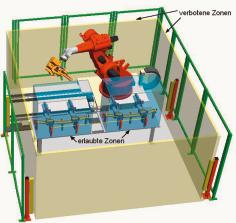
Da alle Überwachungsfunktionen softwaretechnisch realisiert sind, lassen sich neuartige Sicherheitsfunktionen umsetzen, die mit einem nicht softwarebasierten System nicht möglich sind. So können durch einfaches Einlernen geometrische, dreidimensionale Schutzbereiche konfiguriert und als erlaubte oder verbotene Zonen definiert werden. Dringt der Roboter in eine verbotene Zone ein oder verlässt er eine erlaubte Zone, wird er vom Safety-Controller stillgesetzt.
Diese Funktion kommt zum Beispiel in einer Punktschweißzelle bei der Blechformwerke AG in Bernsbach zum Einsatz. Die Sicherheitszonen sind so konfiguriert, dass innerhalb der Schutzumzäunung eine virtuelle Wand entsteht, die den Roboter stillsetzt, bevor er das mechanische Schutzgitter erreichen kann. Innerhalb von erlaubten Arbeitsräumen kann sich der Kollege aus Blech allerdings abwechselnd an zwei Schweißstationen frei bewegen. An der jeweils freien Station kann der Werker ein Fertigteil entnehmen oder die Station mit einem Rohteil beschicken.
Für den Einrichtbetrieb schreibt die EN-775 eine maximale Geschwindigkeit von 250 mm/s am Werkzeugflansch vor. Der Safety Controller überwacht diesen Wert und schaltet den Roboter bei einer Überschreitung der Grenzgeschwindigkeit sicher ab. Bei einigen Applikationen ist es unumgänglich, dass ein Werker den Bearbeitungsprozess beobachtet, um gegebenenfalls Korrekturen an den Prozessparametern vornehmen zu können. Hierzu wird im Automatikbetrieb die Geschwindigkeit reduziert und sicher überwacht. Bei niedriger Geschwindigkeit kann sich der Werker während des Produktionsbetriebes ohne trennende Schutzeinrichtungen in ummittelbarer Nähe des Roboters aufhalten, ohne dass dabei ein Zustimmungsschalter betätigt werden muss. Wegen der geringen Verfahrgeschwindigkeit kann der Werker in Gefahrensituationen die nächstgelegene Notabschaltung betätigen.
Auch bei der Arenz Plastifizier- und Verschleißtechnik GmbH in Meckenheim ist eine Roboteranlage mit personensicherer Steuerung im Einsatz. Der Roboter hat die Aufgabe, verschlissene Extruderschnecken aus Spritzgießmaschinen durch einen Plasmapulverauftrag aufzupanzern. Der Werker betritt nach einer Anmeldeprozedur den Arbeitsraum des Roboters und kann dann den Schweißprozess kontrollieren und gegebenenfalls korrigieren. Da kein Zustimmungsschalter erforderlich ist, kann sich der Mitarbeiter ganz auf seine Arbeit und den Prozess konzentrieren.
Bei der Europipe GmbH in Ratingen kommt eine so genannte 6D-Maus zum Einsatz, die am Werkzeug montiert ist. Damit lässt sich der Roboter in allen Freiheitsgraden bewegen. Die Bewegungsfreigabe erfolgt durch einen Zustimmungsschalter. Europipe stellt längsverschweißte Pipelineröhren her. Vor dem eigentlichen Schweißvorgang muss ein Anfangsblech an das Rohr angeheftet werden. Der Roboter unterstützt den Werker bei seiner Tätigkeit und positioniert grob ein Anschweißblech automatisch an einer Vorposition am Rohr. Der Werker führt den Roboter danach mit der 6D-Maus an die exakte Schweißposition. Dort hält der Roboter das Blech in Position, und der Werker hat nun beide Hände frei, um das Blech anzuheften. Der Kollege aus Blech stellt dabei keine Gefahr dar, denn er wird auf sicheren Stillstand hin überwacht.
Der Savety Controller verfügt zusätzlich über eine frei programmierbare Sicherheits-SPS. Damit lassen sich verschiedene interne Informationen miteinander verknüpfen: Etwa die Stellung des Roboters mit externen Sicherheitssignalen, ein geöffnetes oder geschlossenes Schutzgitter oder ein Zustimmungsschalter für den Not-Aus. Die Verknüpfungsergebnisse können an sicheren Ausgängen ausgegeben werden, um Schaltvorgänge in der Peripherie einzuleiten. Eine praktische Anwendung ist etwa das sichere Abschalten einer Laserstrahlquelle in einer Laserschneid-Anwendung. Die SPS überwacht dabei die Austrittsrichtung des Laserstrahls, die sich aus den Achsstellungen des Roboters ergibt. Zeigt der Laserstrahl nicht auf das Bauteil, sondern auf die Kabinenwände, schaltet die Steuerung den Laserstrahl sicher ab. Dies verhindert, dass der Laser die Kabinenummantelung durchtrennt und aus der Zelle austritt.
Die Beispiele zeigen, welches Potenzial die personensichere Robotersteuerung bietet. Die softwarebasierte Realisierung von Sicherheitsfunktionen ist nicht nur kostengünstig, sondern macht elektromechanische Komponenten für die Überwachung des Roboters wie Sicherheitsschalter oder Nockenbahnen überflüssig.
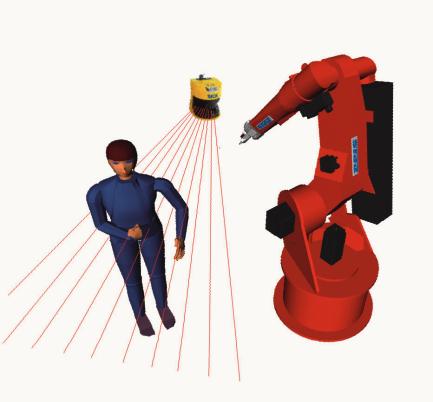
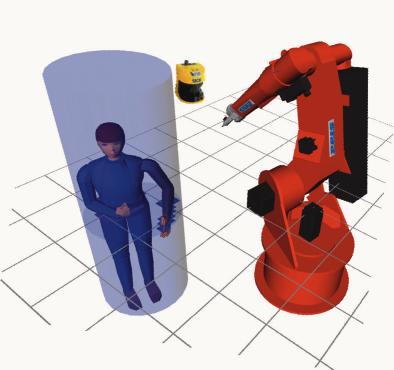
Die Obernburger wollen noch einen Schritt weiter gehen: Zukünftig soll das Arbeitsumfeld des Roboters in Form eines 3D-Umweltmodells abgebildet und dem Safety Controller übermittelt werden. Dann arbeitet der stählerne Kollege nicht mehr blind, sondern kann sich sicher zwischen den modellierten Hindernissen bewegen. Personen werden von den Sensoren sicher erkannt und in das 3D-Umweltmodell integriert. Die Steuerung ist dann in der Lage, den Abstand zwischen Roboter und Personen zu überwachen und entsprechend zu reagieren. Kollisionen lassen sich auf diese Weise ebenfalls vermeiden.
Software überwacht jeden Mucks des stählernen Kollegen
Teilen:








{kind=link}