


Mit einem Softwarepaket zum Einrichten von Roboterzellen hat die Flexstructures GmbH aus Kaiserlautern den Robotics Award 2017 abgeräumt. Das Simulationsprogramm bietet Funktionalitäten, die bislang auf dem Markt nicht verfügbar waren.
Beim Einrichten von Roboterzellen tun sich die Autobauer schwer. Davon kann Oliver Hermanns gleich mehrere Lieder singen, denn er kennt die Praxis bei mindestens drei großen Herstellern: „Die Techniker brauchen Wochen und manchmal sogar Monate, bis sie eine Lösung gefunden haben, die funktioniert“, so der Geschäftsführer der Flexstructures GmbH. Funktionieren heißt, dass die Roboter kollisionsfrei ihre Bahnen ziehen, die Aufgabenpakete abarbeiten und fast gleichzeitig fertig sind. Die Frage, ob der Ablauf optimal ist, stellen sich die Autobauer erst gar nicht. „Die sind froh, wenn sie durch sind“, weiß Hermanns.
Da stellt sich natürlich die Frage, warum eine technische Vorreiterbranche wie die Automobilindustrie sich bei dieser Aufgabe so schwer tut, warum gestandene Techniker beim Einrichten einer Roboterzelle nach einem Schema vorgehen, sich dabei an einer bestehenden Zelle orientieren und auf Erfahrungen mit dem Vorgängermodell bauen. Sie führen dabei den Roboter schrittweise durch die Prozedur, teachen die Punkte ein und achten darauf, dass es zu keinen Kollisionen kommt. Nicht umsonst stehen die stählernen Kollegen auf Linearachsen. So lassen sie sich leichter verschieben, wenn sie eine bestimmte Stelle nicht erreichen. „Die haben schon immer so gearbeitet, wahrscheinlich seit es Roboter gibt“, vermutet Hermanns. „Und sie haben damit auch kein Problem, denn bisher sind sie ja immer zu einem Ergebnis gekommen.“
Vor fünf Jahren ist das Unternehmen Flexstructures mit seiner IPS-Software angetreten um zu zeigen, dass es auch anders geht. „Mathematik muss zu etwas gut sein“, ist das Motto von Geschäftsführer Hermanns. „Mit unseren Algorithmen probieren wir nicht herum, sondern rechnen das Problem durch und kommen nach einer Stunde zu einem ersten Ergebnis, das der optimalen Lösung schon sehr nahe ist.“ Die Spezialisten aus Kaiserslautern gehen die Sache nicht nur strukturiert an, sie haben dabei einen ganz anderen Zeithorizont. Die Mitarbeiter von Flexstructures denken in Stunden, nicht in Wochen oder Monaten.
Die IPS-Software, die dahinter steckt, wurde ursprünglich wurde vom Fraunhofer Chalmers Centre for Industrial Mathematics FCC zusammen mit dem Fraunhofer ITWM in Kaiserslautern entwickelt, wo Oliver Hermanns gearbeitet hat, bevor er Chef von Flexstructures wurde. Sein Unternehmen ist eine Ausgründung des Instituts und kümmert sich vor allem um das Marketing und den Vertrieb der Software, ist aber auch an der Weiterentwicklung der Tools beteiligt. „Im Fraunhofer ITWM findet die fundamentale Forschung statt, wir arbeiten anwendungsorientiert und sind am Kunden dran“, so Hermanns.
IPS steht für Industrial Path Solutions. Der Name ist Programm. Im Kern dreht sich alles um industrielle Pfade. Am Anfang ging es darum, kollisionsfreie Bahnen für den Ein- und Ausbau von Objekten zu generieren, etwa wenn ein Radio oder eine elektronische Box im Fahrzeug untergebracht werden soll. „Konstruieren kann man viel“, weiß Hermanns aus Erfahrung. „Wir wollen wissen, ob es geht, ob man das Teil überhaupt an die geplante Stelle bewegen und dort montieren kann.“ Die Software lässt sich auch problemlos für die Berechnung von Roboterzellen nutzen. Für die Algorithmen, die dahinter stehen, spielt es keine Rolle, ob sich Bauteile oder Roboterarme bewegen. Letztendlich sind das alles nur Geometrien, die im Raum bewegt werden und nirgends anecken dürfen.
Oliver Hermanns sind keine Verfahren bekannt, die mit den Programmen aus der Fraunhofer Forschung mithalten könnten. „Es gibt nichts vergleichbares“, schwört der Manager. „Die Macht unserer Tools ist nicht einfach zu beweisen, aber wenn es ein Kunde ganz genau wissen will, legen wir auch mal die mathematischen Folien auf.“
Das Programmpaket besteht aus mehreren Tools, die an sich bereits Alleinstellungsmerkmale aufweisen und Möglichkeiten bieten, die vergleichbare Systeme nicht haben. Allerdings entfaltet die Software ihr Potenzial erst, wenn die Tools gemeinsam zum Einsatz kommen. Das Grundmodul nennt sich „Robot Optimization“ und ist speziell für die Optimierung von Roboterzellen konzipiert. Wer das bislang manuell gemacht hat, für den ändert sich durch die Software so ziemlich alles. Theoretisch kann das Programm sofort loslegen und alle möglichen Kombinationen von Roboterpfaden durchrechnen. Dabei käme eine astronomisch hohe Zahl heraus, die aber keine praktische Bedeutung hat. Sinnvoll ist es, die ungefähren Positionen der Roboter festzulegen. Das System errechnet dann immer noch tausende von Varianten und fasst das Ergebnis in einer Matrix zusammen. Darin steht dann zum Beispiel, dass der erste Roboter 25 Möglichkeiten hat, den Punkt A zu erreichen. Für Roboter 2 gibt es 5 Pfade, Roboter 3 und 4 können A nicht erreichen. Danach wird das Ergebnis schrittweise verfeinert: So liefert das System die kürzesten Verfahrwege aus allen Varianten und berechnet, welcher Roboter was am besten erledigen kann. Auch die Reihenfolge der Arbeitsschritte wird optimiert. Üblicherweise sind vier oder fünf Roboter in einer Zelle unterwegs. In der Software gibt es allerdings keine Beschränkung hinsichtlich der Zahl der Maschinen. Theoretisch ließen sich mit dem Tool auch zwanzig Modelle in Einklang bringen, wobei allerdings die Berechnungszeit exponentiell mit der Zahl der Roboter steigt.
Das System ist auch für Überraschungen gut. So könnte eine Empfehlung lauten: Nimm zwei von deinen acht Robotern aus der Zelle, die verbleibenden sechs Modelle erledigen die Arbeit in der gleichen Zeit und vielleicht sogar noch schneller. Über Pi mal Daumen und mit Probieren wird wohl kaum ein Techniker zu dieser Erkenntnis vorstoßen. Und nicht zuletzt sorgt das Tool über das sogenannte „Load Balancing“ dafür, dass alle Roboter gleich ausgelastet sind. Das bedeutet nicht, dass jeder Roboter das gleiche Arbeitspensum absolvieren muss, sondern dass alle Modelle etwa zum gleichen Zeitpunkt fertig sind. So wird vermieden, dass am Ende fünf Roboter auf Kollege Nummer sechs warten müssen, der schließlich die Zykluszeit bestimmt.
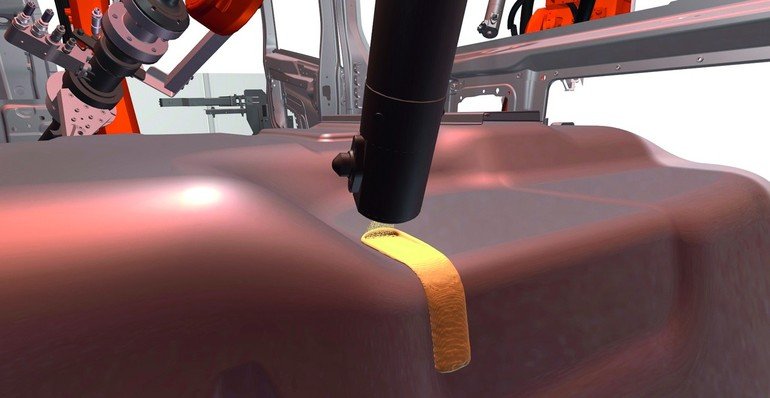
Zu der Software aus der Fraunhofer Forschung gehört auch das Modul „Virtual Paint Sealing“, mit dem sich Versiegelungsprozesse simulieren lassen. Alle Schweißnähte an der Karosse müssen versiegelt werden, denn hier könnte später Spritzwasser, Feuchte und Salz eindringen und das Fahrzeug würde rosten. Bei der Versiegelung tragen die Roboter an den brisanten Stellen PVC-Nähte auf, deren komplette Länge pro Fahrzeug zwischen 50 und 200 m liegt.
Während das Basismodul der IPS-Software für die Kollisionsfreiheit und die gleichmäßige Auslastung der Roboter sorgt, soll das Tool „Virtual Paint Sealing“ dem Autobauer eine gute Naht liefern. Für die Qualität des Auftrags ist die Düsenposition ausschlaggebend. „Mit den gängigen Simulationen wird die Düse in einem optimalen Winkel über die Naht geführt“, weiß Oliver Hermanns. „Aber das ist reine Theorie.“ Später merke man, dass das in der Praxis gar nicht umzusetzen ist. Schließlich muss der Roboter erst einmal die Stelle erreichen, wo er die PVC-Naht aufspritzen soll. Dazu taucht der Arm in das Innere des Fahrzeugs ein, muss sich um die eine oder andere Ecke herum winden und darf dabei auf keinen Fall mit dem Fahrzeug kollidieren. Ist der stählerne Kollege schließlich am Ziel, dann ist der optimale Düsenwinkel in der Regel nicht mehr gegeben. „Ich muss wissen, in welchem Winkel der Auftrag erfolgt“, betont Geschäftsführer Hermanns. „Erst dann kann man die Qualität der PVC-Naht beurteilen.“
Die Simulation liefert also die Antwort auf zwei Fragen: Kann ich die Naht an der geplanten Stelle aufsprühen, kommt der Roboter da überhaupt hin? Falls ja, in welcher Qualität erfolgt die Versiegelung? Nach der Simulation kann sich der Anwender das Ergebnis im CAD-Modell anschauen und weiß: So sieht das am Ende aus, das ist möglich. Wenn ihm die Naht zu dünn ist oder wenn sich das Material an Ecken und Kanten aufhäuft, dann muss eben weiter optimiert werden. Leider kann man eine Zelle nicht so perfekt gestalten, dass der Roboter bei der Versiegelung jede gewünschte Stelle erreicht. Beim Zusammenbau und Fügen von Blechen entstehen nun mal Stellen, wo der stählerne Werker einfach nicht mehr hinkommt. In dem Fall muss der Mitarbeiter aus Fleisch und Blut nochmal ran und mit dem Pinsel Hand anlegen. Dieser manuelle Aufwand soll natürlich so gering wie möglich gehalten werden. Das Versiegelungs-Programm der Spezialisten aus Kaiserslautern hilft dabei.
Das Modul „Cable Simulation“ ist das älteste Tool der Profis aus Kaiserslautern und darauf sind sie besonders stolz. „Mit unsere Software für Kabel und Schläuche haben wir uns vor fünf Jahren auf die eigenen Beine gestellt“, erzählt Hermanns. Das Programm kommt allgemein in der Fahrzeugindustrie zum Einsatz. Es berechnet und optimiert Kabel für bewegte Bauteile wie verstellbare Sitze oder klappbare Spiegel und berechnet die Schlauchpakete bei Robotern. „Das ist ein wichtiges Thema“, weiß Hermanns. “Wenn schon nach kurzer Zeit die Versorgungskabel am Roboter kaputt gehen, dann weiß meist kein Mensch warum.“
Man sieht es dem Schlauch eben nicht an, wie er sich verdreht und verbiegt, welchen Spannungen er im Innern ausgesetzt ist. Keiner kann auch nur annähernd abschätzen, wie lange das Material die Tortur mitmacht. „Aber wir können das vorhersagen“, versichert der Manager nicht ohne Stolz. „Mit unserer Software können wir in den Schlauch hineinschauen und genau sagen, was gerade passiert.“ Das Tool liefert dabei alle möglichen Daten: Wie hoch sind die Zugkräfte? Welchen Biegeradius nimmt das Teil ein? Ist das Material überbeansprucht? Und der Anwender bekommt konkrete Hinweise, wie er das Schlauchpaket entlasten kann: Welche Art Befestigung oder Clip muss ich wo am Roboter anbringen, damit ich die Belastung aus dem Schlauch heraus bekomme? Wie lang muss der Schlauch sein? Wie muss er geführt werden, damit er möglichst wenig Kontakt mit dem Fahrzeug oder dem Roboter hat? „Zugleich aber muss das Schlauchpaket alle Bewegungen des Roboters mitmachen“, gibt Hermanns zu Bedenken. „Das ist alles in allem eine schwierige Aufgabe, die gerne unterschätzt wird “.
Das Tool für Kabel und Schläuche ist an sich schon eine Lösung, die ihresgleichen sucht. Aber Hermanns packt noch einen drauf: „Alle Berechnungen laufen in Echtzeit. Der Roboter bewegt sich in der Simulation und das komplette Schlauchpaket wird rechnerisch mitgenommen.“ Dafür mussten die Experten ganz tief in das Wesen des Schlauchs eintauchen. Im Prinzip betrachten sie die Struktur als ein System, das immer einen energiearmen Zustand einnehmen will. Wirkt eine Kraft von außen, in diesem Fall der Roboter mit seinen Bewegungen, dann tauschen sich die Zug-, Torsions- und Biegeenergien so lange aus, bis möglichst viel Spannung aus dem biegeschlaffen Teil wieder draußen ist. Dieser Vorgang wird in der Simulation rechnerisch nachvollzogen.
Bei der Planung der Roboterzelle spart der Anwender mit Abstand die meiste Zeit. Hier nehmen die Spezialisten aus Kaiserslautern den größten Teil vom Kuchen weg. Aber unterm Strich beschleunigt die IPS-Software auch die Inbetriebnahme nach eigenen Angaben um 75 Prozent. Das ist der Zeitgewinn durch die Simulation. Aber die Inbetriebnahme besteht ja nicht nur aus Rechenzeit sondern bedeutet schließlich, dass das Fahrzeug auf der Linie läuft. „Es verbleiben aber noch handwerkliche Restarbeiten, die sich durch die Simulation nicht ersetzen lassen“, so Hermanns.
Auch in der Zykluszeit macht sich die Simulation positiv bemerkbar. „Wir achten nicht darauf, dass sich der Roboter schneller bewegt, sondern dass er kurze Wege fährt“, erklärt Hermanns. Außerdem bringt eine geschickte Anordnung der Roboter bei der Abarbeitung der Sequenzen einen Gewinn“. Die Versiegelungsnaht über 200 m fährt der Roboter natürlich nicht am Stück ab, sondern er muss seine Arbeit immer wieder unterbrechen und sich zum nächsten Teilstück bewegen. Wie er diese oft kurzen Strecken zurücklegen soll, entscheidet der Techniker ohne Software aus dem Bauch heraus. Hermanns: „Kann er nun so rum oder so rum schneller? Wir berechnen das und zwar für jedes Teilstück. Da kommt am Ende ganz schön was zusammen“.
Um die 25 Prozent konnten die Spezialisten von Flexstructures die Zykluszeit schon drücken. Für die Autobauer ist das ein Segen. „Auch bei zehn Prozent machen die bereits einen Luftsprung“, sagt Hermanns mit einem Augenzwinkern.
„Kabel und Schläuche haben es in sich“

Herr Hermanns, was unterscheidet die IPS-Software aus Ihrem Haus von anderen Simulationsprogrammen auf dem Markt?
Wir nutzen Algorithmen, die bislang auf dem Markt nicht verfügbar waren. Dadurch haben unsere einzelnen Tools bereits ein Alleinstellungsmerkmal. Wenn diese Tools dann noch kombiniert genutzt werden, entfaltet das Programmpaket sein ganzes Potenzial und der Anwender hat einen Mehrwert, den es bislang so nicht gab.
Zum Beispiel?
Wir berechnen alle möglichen Roboterpfade in der Zelle. Der Anwender bekommt bereits nach einer Stunde ein erstes brauchbares Ergebnis. Dieser Prozess dauert üblicherweise mehrere Wochen, manchmal sogar Monate. Außerdem werden die Schlauchpakete der Roboter in der Simulation in Echtzeit mit berücksichtigt. Dafür gibt es keine vergleichbare Lösung auf dem Markt.
Warum sind Kabel und Schläuche so wichtig für den Nutzer?
Biegeschlaffe Bauteile sind oft vorzeitig verschlissen und die Ursache lässt sich nicht auf den ersten Blick erklären. Solche Elemente sind dann meist hohen Belastungen ausgesetzt und die machen wir mit unserer Software sichtbar. Wir sehen in der Simulation, mit welchem Radius sich der Schlauch biegt, welche Zugkräfte und Torsionskräfte wirken. Natürlich können wir auch Tipps geben und die sind oft ganz einfach. Manchmal reicht es aus, den Schlauch zu kürzen oder an anderen Stellen am Roboter zu befestigen.
Wenn Schlauchpakete bewegt und verdreht werden, reagieren sie oft unvorhersehbar. Wie bekommen Sie das rechnerisch in den Griff?
In diesem Bereich sind wir der Technologieführer, da kommen wir her und das ist unsere Kernkompetenz. Schlauchpakete haben es in sich, diese sogenannten nichtlinearen Strukturen verhalten sich in der Tat kompliziert. Im Prinzip machen wir so etwas wie eine Energiebetrachtung. Biegeschlaffe Teile haben nämlich die Eigenschaft, dass sie immer einen möglichst energiearmen Zustand einnehmen. Wenn man also eine Kraft in das System einbringt, dann will das Kabel die Energie nach seinem eigenen Muster verteilen. Biege-, Torsions- und Zugenergien tauschen sich aus und führen zu einer neuen Form. Und genau das machen wir simulativ und bekommen dadurch immer die natürliche Form des Kabels raus. Die Struktur verhält sich so komplex, dass man diese nur über den Ansatz der nichtlinearen Strukturmechanik in den Griff bekommt.
Man merkt gleich, dass Sie hier zuhause sind. Müssen Sie das auch dem Kunden so ausführlich erklären?
Die wollen in erster Linie ihr Problem lösen. Schließlich steht die ganze Anlage, wenn mal wieder irgendwo ein Schlauch gerissen ist. Aber wenn es einer ganz genau wissen will, dann zücken wir schon mal die mathematischen Folien.
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:







{kind=link}