
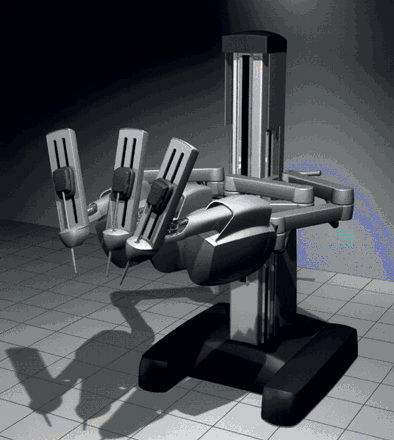


Unter Einsatz eines minimalinvasiven Systems manövrieren Chirurgen per Fernhandgriffe ihre Werkzeuge. Als Träger von Werkzeugen und Endoskop fungieren drei Roboterarme, deren Bewegungen Motoren regeln. Sieben Freiheitsgrade bilden die Bewegungen des Chirurgen nach.
Schon bald kann es passieren, dass der Patient in einer kleinen Kreisklinik liegt und der weltberühmte Chirurg aktuell gerade über Internet aus den USA operiert. Wie von Geisterhand angetriebene Roboterarme werden die Operation ausführen – vom anwesenden Assistenten eingerichtet und vom Chirurgen aus der Ferne gesteuert.
Die Befürworter von Fernchirurgie sehen einen baldigen Einsatz dieser Technologie sogar noch weiter weg – im Weltraum. Ihrer Meinung nach stehen die Technologien schon zur Verfügung: präzise Servomechanik, Force-Feedbacksensoren für das taktile Fühlen, bewegungsverkleinernde Software (Motion Scaling Software), Kommunikationsverbindungen und die nötigen Algorithmen zur Bewegungsregelung.
Das computerunterstützte, minimalinvasive Chirurgiesystem (MIS), das von Intuitive Surgical Inc. aus Mountain View/Kalifornien eingeführt worden ist, weist all diese Eigenschaften auf und wird bereits dutzendfach eingesetzt. Bei der Verwendung dieser Technologie, die ursprünglich für fernchirurgische Anwendungen entwickelt worden ist, verbindet das System „Intuitive“ die natürlichen Handbewegungen traditioneller Chirurgie mit der etwas traumatisierten Methode von MIS.
Anfänglich stand die Herzchirurgie im klinischen Zentrum des „Intuitive“-Systems. Mittlerweile ist es jedoch für eine ganze Reihe chirurgischer Disziplinen einsetzbar. Eine Operation läuft etwa wie folgt ab: Der Chirurg macht kleine Einschnitte (< 1 cm) und führt spezielle Röhrchen, so genannte Kanülen, ein. Diese Röhrchen bilden Öffnungen in dem Körper und schützen umliegendes Gewebe. Danach werden die drei Roboterarme in Position gebracht. Jeder Roboterarm dient als Träger, einerseits für das Endoskop und andererseits für extrem schlanke Werkzeuge, die durch die Einschnitte eingeführt werden sollen. Ein gleitender Koppler hält das Werkzeug am Arm. Drei Motoren regeln die Armbewegungen. Zwei treiben den Arm vorwärts und rückwärts, links und rechts, der dritte bewegt den Koppler auf und ab. Gemeinsam bilden diese drei Freiheitsgrade die Schulter- und Ellbogenbewegungen des Chirurgen nach.
Durch die Technologie von „EndoWrist“ erhalten die Werkzeugspitzen vier zusätzliche Freiheitsgrade: innere Stampf-, Gier-, Roll- und Greifbewegungen. Dabei ist die innere Stampfbewegung die vom menschlichen Handgelenk ausgeführte Bewegung, als wenn man an eine Tür klopft. Innere Gierbewegung meint die seitliche Bewegung, die mit Zuwinken oder Abwischen eines Tisches verbunden ist.
Vier am Fuß jedes Roboterarmes befindliche 25-mm-Motoren treiben das EndoWrist über Klaviersaiten an. Das „Intuitive“-Regelsystem besteht aus vier digitalen Signalprozessoren (DSPs). Mit der Fähigkeit, 300 Millionen Berechnungen pro Sekunde auszuführen, steuern die DSPs die einzelnen Motoren an.
Mit Hilfe des 3D-Videobildes steuert der Chirurg die Werkzeuge durch bekannte Gerätehandgriffe. Dabei muss er sich nicht über den Patienten beugen, da er von einer sitzenden Position operiert und seine Arme sich in einer natürlichen und aufgelockerten Ausrichtung befinden. Die Motion Scaling Software, die im Motorregler eingebettet ist, wandelt die großen natürlichen Bewegungen des Chirurgen in äußert präzise Mikrobewegungen um. Zugleich wandelt die Software jede vom Chirurgen ausgeführte Bewegung in eine identische, jedoch verkleinerte Bewegung an der zu operierenden Stelle um.
Durch das minimalinvasive chirurgische System von Intuitive werden Werkzeuge von den Chirurgen über Fernhandgriffe manövriert. Bewegungsregler und Force-Feedbackdaten bilden diese Bewegungen im chirurgischen Bereich nach. Ohne diese Software sind andere MIS-Systeme „gegenintuitiv“, da sie die natürlichen Bewegungen des Chirurgen umkehren, weil die chirurgischen Werkzeuge sich gegen den Eintrittspunkt am Körper drehen. Zusammen mit der Technologie des „EndoWrists“ erlaubt die Motion Scaling Software dem Chirurgen, auch schwierige Körperstrukturen zu erreichen, als würde er die Operation direkt ausführen.
Frederic Moll, Geschäftsführer und Mitbegründer der Intuitive Surgical Inc.: „Solche Innovationen werden nicht nur den Einsatz von minimalinvasiven chirurgischen Eingriffen verbessern, sondern auch die daraus resultierenden Vorteile wie schnellere Erholzeiten, weniger Komplikationen und verbesserte Heilung.“ Moll betont auch: „Die Technologie von MIS ist ziemlich neu, nur 15 Prozent aller heutigen chirurgischen Eingriffe benutzen diese Technik.“ Und die Fernchirurgie? „Aus technischer Sicht haben wir die Werkzeuge dafür“, betont Marketingleiter Daniel Hawkins, „aber die heutige Ausrichtung befindet sich nach wie vor im Operationssaal.“
Beni Anderhalden Technischer Editor, Maxon Motor, Sachseln/Schweiz
zukunftsmärkte
Die Entwickler der Fernchirurgie betonen, dass die Technologien dafür bereits verfügbar sind: präzise Servomechanik, Force-Feedbacksensoren für das taktile Fühlen, bewegungsverkleinernde Software (Motion Scaling Software), Kommunikationsverbindungen und die nötigen Algorithmen zur Bewegungsregelung. Das computerunterstützte, minimalinvasive Chirurgiesystem (MIS) weist all diese Eigenschaften auf und wird bereits dutzendfach eingesetzt.
Unsere Webinar-Empfehlung

Der Summit richtet sich an Entscheider aus den Bereichen Fertigung, Instandhaltung, Fabrikautomatisierung, Automatisierung, Intralogistik und Fabrikplanung, Netzplanung, Netzwerkinfrastruktur, Innovationsmanagement. Daneben sind Hersteller aus den Bereichen Maschinenbau, Sensorik,…
Teilen:







{kind=link}