
Die künstliche Intelligenz, kurz KI, ist eine Zukunftstechnologie, die gerade in der Robotik verstärkt zum Einsatz kommt. So werden bereits KI-Module in kollaborierende Roboter, den sogenannten Cobots, eingebaut, um die Bedienung der Maschinen zu vereinfachen und deren Integration in die Produktion zu beschleunigen. Das maschinelle Lernen spielt in diesem Zusammenhang eine Schlüsselrolle und eignet sich hervorragend dafür, der Roboterprogrammierung die Komplexität zu nehmen. In Zukunft sollen auch Laien in der Lage sein, einem Cobot das beizubringen, was er tun soll. Ohne Spezialwissen und ohne nennenswerten zeitlichen Aufwand.
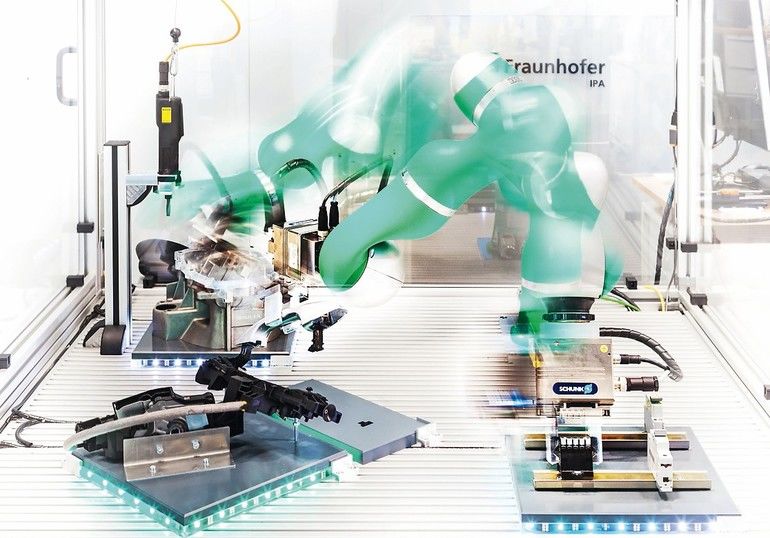
Zu den Partnern im Forschungsprojekt „Rob-Akademi“ zählen unter anderem das Fraunhofer IPA und das Institut für Industrielle Fertigung und Fabrikbetrieb IFF der Universität Stuttgart. Gemeinsam sollen nun Techniken entwickelt werden, mit denen sich Roboter einfacher für Montageaufgaben vorbereiten lassen. Die dafür notwendige Programmierung soll in Zukunft stärker automatisiert werden. Grundlage dafür ist ein digitaler Zwilling der Produktionsumgebung. Dieses rein digitale Abbild wird zusammen mit einem speziellen Programmiergerüst in einer physikalischen Simulationsumgebung genutzt, in der Roboter das flexible Montieren lernen sollen. Dazu erkunden die Maschinen autonom in der Simulationsumgebung ihr Umfeld, planen darauf aufbauend ihr Verhalten und optimieren es selbstständig. Mit anderen Worten: Sie lernen fortlaufend.
Zum Einsatz kommt dabei KI, präziser gesagt das maschinelle Lernen und dessen Teilgebiet, das sogenannte „Reinforcement Learning“. Dahinter steckt ein Algorithmus, der nach dem Prinzip „Versuch und Irrtum“ lernt – so wie es der Mensch gelegentlich auch macht. Das Programm bekommt ein Belohnungssignal für jede gelungene Aktion und wird auf diese Weise Schritt für Schritt besser. Bei dieser heuristischen Methode probiert der Roboter also so lange zulässige Möglichkeiten aus, bis die gewünschte Lösung gefunden wurde. Fehlschläge werden dabei in Kauf genommen.
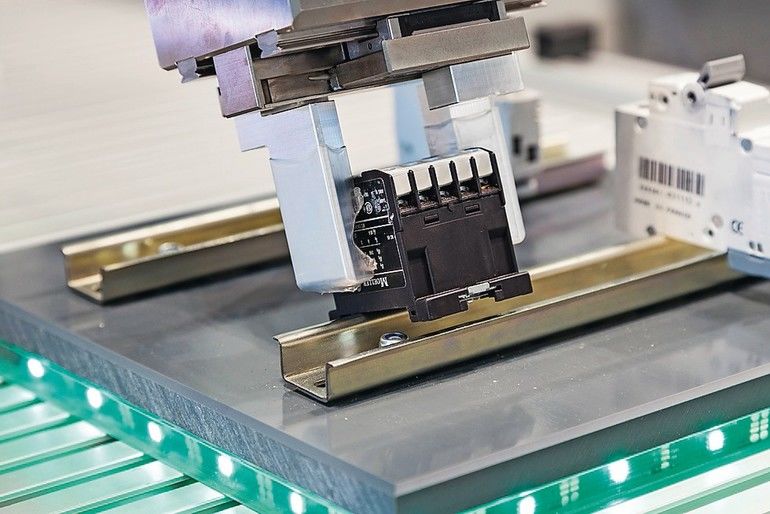
Im Projekt werden drei anwendungsbezogene Lernmodule untersucht, die das Expertenwissen rund um die Roboterprogrammierung und die auszuführende Montageoperation kapseln: Das „Perzeptionsmodul“ für die Objekterkennung, das Lernmodul „kraftgeregeltes Fügen“ für robuste Fügestrategien und das Lernmodul „Schnappverbindungen“ mit einem detaillierten physikalischen Fügemodell. Mit diesen Techniken sollen schließlich robuste Roboterprogramme erstellt werden, mit denen die Simulationsergebnisse in die Realität übertragen werden. Mit drei praktischen Anwendungsfällen (Schaltschrank-, Schalter- und Leiterplattenmontage) überprüfen die Projektpartner ihre Ergebnisse. Die Module für kraftgeregeltes Fügen und Schnappverbindungen nutzen eine bereits verfügbare IPA-Software für kraftgeregelte Montageaufgaben und sollen diese erweitern.
Das Projekt wird in einer Zeit aufgelegt, in der Montageanwendungen immer noch hohe Anforderungen an die Roboterprogrammierung stellen. Dazu gehören vielfältige und gleichzeitig anspruchsvolle, oft kraftgeregelte Prozesse, eine hohe Variantenzahl und kurze Zykluszeiten. Das ist auch der Grund, warum sich vor allem kleine und mittlere Unternehmen mit ihren kundenspezifischen Produkten oft noch zurückhalten, Roboter für ihre Montage zu nutzen. Und dass derzeit nur ein Experte die Programmierung vornehmen kann, macht die Sache auch nicht einfacher.
Das ist schade, denn Roboter können ergonomisch ungünstige, gefährliche und monotone Arbeiten übernehmen und erreichen dabei eine gleichbleibende Qualität in der Ausführung. Die Maschinen sind deshalb ein entscheidender Wettbewerbsfaktor gerade in Hochlohnländern wie Deutschland. Durch viele Automatisierungs-Potenzialanalysen, die das Fraunhofer IPA bereits weltweit durchgeführt hat, kennen die Forscher die Bedarfe der Unternehmen und bringen diese Expertise ins Projekt ein.
Kontakt:
Fraunhofer IPA
Nobelstraße 12
70569 Stuttgart
Tel. +49 711 970–3874
Steckbrief „Rob-Akademi“
Der vollständige Titel des Verbundprojekts hat es in sich: „Generierung robuster Steuerungs-Algorithmen für Roboter aus der Physiksimulation mittels Methoden der Künstlichen Intelligenz zur hochflexiblen, variantenreichen Montage in Losgröße 1“.
Das Projekt wurde im Juli 2020 gestartet, hat eine Laufzeit von zwei Jahren und wird vom Bundesministerium für Bildung und Forschung (BMBF) gefördert. Projektträger ist das Deutsche Zentrum für Luft- und Raumfahrt e.V. (DLR). In der gleichen Fördermaßnahme läuft ein weiteres Forschungsprojekt vom Fraunhofer IPA mit dem Titel „Deep Picking“. Auch hier spielt die künstliche Intelligenz eine wichtige Rolle und hilft dabei, den roboterbasierten „Griff in die Kiste“ zu optimieren.

Hier finden Sie mehr über:







{kind=link}